TRINAMIC TMCM-1180 Stepper Motor Controller အသုံးပြုသူလမ်းညွှန်

TRINAMIC Motion Control GmbH & Co. KG Hamburg၊ ဂျာမနီ www.trinamic.com
မှဒေါင်းလုဒ်လုပ်ထားသည်။ Arrow.com.
1 အင်္ဂါရပ်များ
PD86-1180 သည် အနုပညာအင်္ဂါရပ်အစုံအလင်ဖြင့် ပြည့်စုံသော mechatronic ဖြေရှင်းချက်တစ်ခုဖြစ်သည်။ ၎င်းသည် အလွန်ပေါင်းစပ်ပြီး အဆင်ပြေသော ကိုင်တွယ်မှုကို ပေးပါသည်။ PD86-1180 တွင် NEMA 34 (flange size 86mm) stepper motor၊ controller/driver electronics နှင့် integrated encoder တို့ ပါဝင်သည်။ TMCM-1180 သည် အာရုံခံကိရိယာမရှိသောဝန်ကိုမှီခိုနေသောလက်ရှိထိန်းချုပ်မှုအတွက်ထူးခြားပြောင်မြောက်သော coolStepTM နည်းပညာအသစ်ပါရှိသောအသိဉာဏ်ရှိသော stepper motor controller/driver module တစ်ခုဖြစ်သည်။ ၎င်းသည် စွမ်းအင်သက်သာသော မော်တာလည်ပတ်မှုကို ခွင့်ပြုသည်။ အဆင့်မြင့် stallGuard2TM အင်္ဂါရပ်ဖြင့် မော်တာ၏ဝန်အား မြင့်မားသော ရုပ်ထွက်ဖြင့် သိရှိနိုင်သည်။ module ကို 86mm flange QMot stepper motor ပေါ်တွင် တိုက်ရိုက်တပ်ဆင်ရန် ဒီဇိုင်းထုတ်ထားသည်။
အဓိကလက္ခဏာများ
လျှပ်စစ်အချက်အလက်
- ပံ့ပိုးမှု Voltage: +24V DC သို့မဟုတ် +48V DC အမည်ခံ
- မော်တာလက်ရှိ- 5.5A RMS အထိ (ပရိုဂရမ်ထုတ်နိုင်သော)
PANDrive မော်တာ
- 5.5A RMS အမည်အထိပါရှိသော အဆင့်နှစ်ဆင့် bipolar stepper မော်တာ။ coil လျှပ်စီးကြောင်း
- ကိုင်ဆွဲအား - 7Nm
ကုဒ်ကိရိယာ
- ပေါင်းစပ် sensOstep သံလိုက်ကုဒ်ဒါ (လည်ပတ်မှုတစ်ခုလျှင် အမြင့်ဆုံး 256 တိုး) ဥပမာ- လည်ပတ်မှုအခြေအနေများနှင့် နေရာချထားမှုအောက်တွင် ခြေလှမ်းဆုံးရှုံးမှုကို ထောက်လှမ်းခြင်းအတွက်
ပေါင်းစပ်ရွေ့လျားမှုထိန်းချုပ်ကိရိယာ
- လှုပ်ရှားမှုလိုလားသူfile အချိန်နှင့်တပြေးညီတွက်ချက်ခြင်း (TMC428/429 ရွေ့လျားမှုထိန်းချုပ်ကိရိယာ)
- မော်တာ parameters များ (ဥပမာ အနေအထား၊ အလျင်၊ အရှိန်) ပြောင်းလဲခြင်းတွင်၊
- အလုံးစုံစနစ်ထိန်းချုပ်မှုနှင့် အမှတ်စဉ်ဆက်သွယ်ရေးပရိုတိုကော ကိုင်တွယ်မှုအတွက် စွမ်းဆောင်ရည်မြင့် မိုက်ခရိုကွန်ထရိုလာ
Bipolar stepper မော်တာမောင်း
- အဆင့်တစ်ဆင့်လျှင် 256 microsteps အထိ
- စွမ်းဆောင်ရည်မြင့်မားသော လုပ်ဆောင်ချက်၊ စွမ်းအားနိမ့်ကျခြင်း။
- Dynamic လက်ရှိထိန်းချုပ်မှု
- ပေါင်းစပ်ကာကွယ်မှု
- ကုပ်ထောက်လှမ်းမှုအတွက် stallGuard2 အင်္ဂါရပ်
- ပါဝါသုံးစွဲမှုနှင့် အပူကို လျှော့ချရန်အတွက် coolStep အင်္ဂါရပ်
မျက်နှာပြင်များ
- ရပ်တန့်ခလုတ်များ (ဘယ်နှင့်ညာ) နှင့် home switch အတွက်ထည့်သွင်းမှုများ
- ယေဘူယျရည်ရွယ်ချက် သွင်းအားစုများနှင့် ယေဘူယျရည်ရွယ်ချက် ရလဒ် ၂ ခု
- USB၊ RS232၊ RS485 နှင့် Can (2.0B အထိ 1Mbit/s) ဆက်သွယ်မှုကြားခံများ
ဘေးကင်းရေးအင်္ဂါရပ်များ
- ထည့်သွင်းမှုကို ပိတ်ပါ။ ဤပင်နံပါတ်ကို ဖွင့်ထားစဉ် သို့မဟုတ် မြေပြင်တွင် အတိုချုံ့ထားသရွေ့ ဒရိုက်ဗာအား ဟာ့ဒ်ဝဲတွင် ပိတ်ထားပါမည်။
- သီးခြားထောက်ပံ့မှု voltagယာဉ်မောင်းနှင့် ဒစ်ဂျစ်တယ် ယုတ္တိဗေဒအတွက် e သွင်းအားစုများ – ယာဉ်မောင်းထောက်ပံ့မှု voltagဒစ်ဂျစ်တယ်ယုတ္တိဗေဒအတွက် ထောက်ပံ့ပေးနေချိန်တွင် e ကို ပြင်ပတွင်ပိတ်ထားနိုင်ပြီး ထို့ကြောင့် ဒစ်ဂျစ်တယ်လော့ဂျစ်သည် အသက်ဝင်နေဆဲဖြစ်သည်။
ဆော့ဝဲ
- TMCL™ သို့မဟုတ် CANopen ဖြင့် ရနိုင်သည်။
- သီးခြား TMCL လည်ပတ်မှု သို့မဟုတ် အဝေးထိန်းစနစ်ဖြင့် လည်ပတ်ခြင်း။
- 2048 TMCL အမိန့်များအထိအတွက် ပရိုဂရမ်မှတ်ဉာဏ် (မတည်ငြိမ်သော)
- PC-based application development software TMCL-IDE ကို အခမဲ့ ရရှိနိုင်ပါသည်။
– CANopen- CiA 301 + CiA 402 (homing mode၊ profile အနေအထားမုဒ်နှင့် အလျင်မုဒ်) ပံ့ပိုးထားသည်။
နောက်ထပ်အချက်အလက်များအတွက် သီးခြား TMCL နှင့် CANopen Firmware Manuals များကို ကြည့်ပါ။
2 အမှာစာကုဒ်များ
ကေဘယ်များမပါဝင်ပါ။ လိုအပ်ပါက သင့်အမှာစာတွင် သင့်လျော်သော ကြိုးယက်ကန်းကို ထည့်ပါ။

3 စက်ပိုင်းဆိုင်ရာနှင့် လျှပ်စစ်ကြားခံခြင်း
3.1 TMCM-1180 အတိုင်းအတာနှင့် Mounting Holes
controller/driver board (TMCM-1180) ၏အတိုင်းအတာများသည် အနီးစပ်ဆုံးဖြစ်သည်။ 86mm x 86mm သည် 86mm stepper motor ၏ နောက်ကျောဘက်နှင့် အံဝင်ခွင်ကျဖြစ်စေရန်။ TMCM-1180 သည် တူညီသောချိတ်ဆက်ကိရိယာများမပါဘဲ ၂၁.၅ မီလီမီတာမြင့်သည်။ M21.5 ဝက်အူများအတွက် အပေါက်လေးပေါက်ရှိသည်။

3.2 PD86-1180 အတိုင်းအတာနှင့် မော်တာ အသေးစိတ်အချက်အလက်များ
PD86-1180 တွင် TMCM-1180 stepper motor controller/driver electronic module၊ sensOstep နည်းပညာအပေါ်အခြေခံထားသော သံလိုက်ကုဒ်ဒါနှင့် 86mm flange size bipolar hybrid stepper motor တို့ပါဝင်သည်။
3.2.1 PD86-3-1180 ၏ အတိုင်းအတာများ

3.2.2 QSH8618-96-55-700 ၏မော်တာအသေးစိတ်အချက်အလက်များ

QSH3.2.3-8618-96-55 ၏ 700 Torque ပုံ
ရိုးရှင်းသောနှိုင်းယှဉ်မှုကိုခွင့်ပြုရန်အတွက် torque ပုံသည် ခြေလှမ်းပြည့်လည်ပတ်မှုအတွက် မော်တာ torque လက္ခဏာများကို အသေးစိတ်ဖော်ပြသည်။ ခြေလှမ်းပြည့်လည်ပတ်မှုအတွက် ပုံမဖော်ထားသည့် resonance point အများအပြား (torque နည်းသော) အမြဲရှိပါသည်။ ၎င်းတို့ကို microstep လုပ်ဆောင်ချက်ဖြင့် လျှော့ချပါမည်။

3.3 TMCM-1180 ၏ချိတ်ဆက်မှုများ
PD86-1180 ၏ controller/driver board သည် အီလက်ထရွန်းနစ်ပစ္စည်းများသို့ မော်တာကွိုင်များကို ချိတ်ဆက်ရန်အတွက် အတွင်းပိုင်းအသုံးပြုသော motor connector အပါအဝင် connector ရှစ်ခုကို ပေးဆောင်ပေးပါသည်။ ပါဝါချိတ်ဆက်ကိရိယာအပြင် အမှတ်စဉ်ဆက်သွယ်ရေးအတွက် ချိတ်ဆက်မှုနှစ်ခု (တစ်ခုသည် mini-USB အတွက်တစ်ခုနှင့် RS232/RS485/CAN အတွက်တစ်ခု) နှင့် နောက်ထပ်အဝင်နှင့်အထွက်အချက်ပြမှုများအတွက် ချိတ်ဆက်ကိရိယာနှစ်ခုရှိသည်။ ထို့အပြင် Step/Direction အတွက် connector တစ်ခုနှင့် encoder အတွက် နောက်တစ်ခုရှိသည်။ output connector သည် ယေဘူယျရည်ရွယ်ချက်အထွက်နှစ်ခု၊ power supply voltage output နှင့် hardware shutdown input တစ်ခု။ shutdown input ကိုဖွင့်ထားလိုက်ပါ သို့မဟုတ် ၎င်းကို ground ချိတ်ထားခြင်းဖြင့် motor driver ကို disable လုပ်ပါမည်။tage ဟာ့ဒ်ဝဲ။ လည်ပတ်မှုအတွက်၊ ဤ input အား ပံ့ပိုးမှု vol နှင့် ချိတ်ဆက်ထားသင့်သည်။tagင input connector သည် stop switches (ဘယ်နှင့်ညာ)၊ home switch input တစ်ခု၊ general purpose inputs နှစ်ခုနှင့် system သို့မဟုတ် signal ground သို့ ချိတ်ဆက်မှုတစ်ခု ပေးပါသည်။



3.3.1 ပါဝါ Connector
ဤ module သည် digital logic (pin 2) နှင့် driver/power s အတွက် သီးခြား power supply inputs များကို ပေးဆောင်ပါသည်။tage (pin 1)။ ထောက်ပံ့ရေးသွင်းအားစုနှစ်ခုစလုံးသည် ဘုံမြေချိတ်ဆက်မှုများကို အသုံးပြုသည် (ပင် 3 နှင့် 4)။ ဤနည်းအားဖြင့် ယာဉ်မောင်းအတွက် ပါဝါထောက်ပံ့မှုtagဒစ်ဂျစ်တယ်ယုတ္တိဗေဒဆိုင်ရာထောက်ပံ့မှုကို ဆက်လက်လုပ်ဆောင်နေချိန်တွင် အနေအထားနှင့် အခြေအနေအချက်အလက်ကို ဆက်လက်ထိန်းသိမ်းထားစဉ် e ကို ပိတ်နိုင်သည်။
+UDRIVER ထောက်ပံ့မှုသာ ပါဝါထောက်ပံ့မှုအား ပါဝါကဏ္ဍသို့သာ ထောက်ပံ့ပေးပါက၊ အတွင်းပိုင်းဒိုင်အိုဒသည် ယုတ္တိဗေဒကဏ္ဍကိုလည်း ပါဝါဖြန့်ဝေပေးမည်ဖြစ်သည်။ ထို့ကြောင့် သီးခြားပါဝါထောက်ပံ့မှုများ မလိုအပ်သည့်အခါ module အား ပါဝါသွင်းရန်အတွက် pin 1 နှင့် 4 ကိုသာ အသုံးပြုနိုင်သည်။

ယူနစ်၏ယုံကြည်စိတ်ချရသောလည်ပတ်မှုကိုသေချာစေရန်အတွက်၊ power supply တွင်လုံလောက်သော output capacitor ရှိရန်လိုအပ်ပြီး supply cables များသည် low resistance ရှိသင့်သည်၊ ထို့ကြောင့် chopper လည်ပတ်မှုသည် unit မှ power supply ripple တိုးလာခြင်းမရှိစေရန်ဖြစ်သည်။ ခုတ်ထစ်လည်ပတ်မှုကြောင့် ပါဝါထောက်ပံ့မှု တုန်ခါမှုသည် အများဆုံး 100mV အနည်းငယ်တွင် ထားရှိသင့်သည်။
Power Supply အတွက် အရိပ်အမြွက်
- ပါဝါကြိုးများကို တတ်နိုင်သမျှ တိုအောင်ထားပါ။
- ပါဝါထောက်ပံ့ရေးကေဘယ်ကြိုးများအတွက် ကြီးမားသော အချင်းများကို အသုံးပြုပါ။

3.3.2 Serial Communication Connector
အမှတ်စဉ်ဆက်သွယ်ရေးအတွက် 2mm pitch 8 pin connector ကို အသုံးပြုသည်။ ဤချိတ်ဆက်ကိရိယာဖြင့် မော်ဂျူးသည် RS232၊ RS485 နှင့် CAN ဆက်သွယ်မှုကို ပံ့ပိုးပေးသည်။

3.3.3 USB ချိတ်ဆက်ကိရိယာ
5-pin mini-USB ချိတ်ဆက်ကိရိယာကို ဘုတ်ပေါ်တွင် ရနိုင်သည် (တပ်ဆင်မှုရွေးချယ်မှုအပေါ် မူတည်နိုင်သည်)။

3.3.4 အထွက်ချိတ်ဆက်ကိရိယာ
2mm pitch 4 pin connector ကို ယေဘူယျရည်ရွယ်ချက် အထွက်နှစ်ခုနှင့် driver ကိုချိတ်ဆက်ရန်အတွက်အသုံးပြုသည်tage ဟာ့ဒ်ဝဲကို ပိတ်ပြီး ယူနစ်မှာ ထည့်သွင်းတဲ့ ပင်နံပါတ်။
မော်တာဒရိုင်ဘာ s ကိုဖွင့်နိုင်ရန်tage /Shutdown (pin 2) ကို +ULogic (pin 1) သို့ ချိတ်ဆက်ပါ။


3.3.5 Input Connector
2mm pitch 6 pin connector ကို ယေဘူယျရည်ရွယ်ချက် သွင်းအားစုများ၊ home နှင့် stop switches များကို ချိတ်ဆက်ရန်အတွက် အသုံးပြုပါသည်။
Mating connector အိမ်ရာ- PHR-6 Mating connector အဆက်အသွယ်များ- SPH-002T-P0.5S

3.2.5.1 ဘယ်နှင့်ညာ ကန့်သတ်ခလုတ်များ
TMCM-1180 ကို မော်တာတစ်ခုတွင် ဘယ်ဘက်နှင့် ညာဘက်ကန့်သတ်ခလုတ်တစ်ခုပါရှိစေရန် စီစဉ်သတ်မှတ်နိုင်သည် (ပုံ 4.9)။
ခရီးသွားသူသည် ကန့်သတ်ခလုတ်များထဲမှ တစ်ခုသို့ရောက်ရှိသောအခါ မော်တာရပ်တန့်သွားသည်။

3.2.5.2 Triple Switch Configuration
အကိုးအကားပြောင်းသည့်နေရာတဝိုက်တွင် သည်းခံနိုင်မှုအတိုင်းအတာကို အစီအစဉ်ဆွဲရန် ဖြစ်နိုင်သည်။ ပုံ 4.10 တွင်ဖော်ပြထားသည့်အတိုင်း triple switch configuration အတွက် အသုံးဝင်ပါသည်။ ထိုဖွဲ့စည်းပုံတွင် ခလုတ်နှစ်ခုကို အလိုအလျောက် ရပ်တန့်ခလုတ်များအဖြစ် အသုံးပြုပြီး ဘယ်ဘက်ရပ်တန့်ခလုတ်နှင့် ညာဘက်ရပ်တန့်ခလုတ်ကြားရှိ ရည်ညွှန်းခလုတ်တစ်ခုအဖြစ် နောက်ထပ်ခလုတ်တစ်ခုကို အသုံးပြုပါသည်။ ဘယ်ဘက်ရပ်တန့်ခလုတ်နှင့် ရည်ညွှန်းခလုတ်ကို ကြိုးဖြင့်ချိတ်ဆက်ထားသည်။ ခြေလှမ်းဆုံးရှုံးမှုကိုသိရှိနိုင်စေရန်အတွက် အလယ်ခလုတ် (ခရီးသွားခလုတ်) သည် ဝင်ရိုးများကို စောင့်ကြည့်စစ်ဆေးနိုင်စေပါသည်။

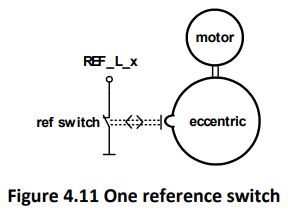
3.2.5.3 မြို့ပတ်ရထားစနစ်များအတွက် ကန့်သတ်ခလုတ်တစ်ခု
မြို့ပတ်ရထားစနစ်ကို အသုံးပြုပါက (ပုံ 4.11)၊ ဤစနစ်တွင် အဆုံးမှတ်များမရှိသောကြောင့် ရည်ညွှန်းခလုတ်တစ်ခုသာ လိုအပ်ပါသည်။
3.3.6 အဆင့်/ဦးတည်ချက် ချိတ်ဆက်ကိရိယာ
Step/Dir အင်တာဖေ့စ်ကိုချိတ်ဆက်ရန်အတွက် 2mm pitch 4 pin connector ကိုအသုံးပြုသည်။

3.3.7 ကုဒ်ပြောင်းကိရိယာ ချိတ်ဆက်ကိရိယာ
ကုဒ်ဒါကိုချိတ်ဆက်ရန်အတွက် 2mm pitch 5 pin connector ကိုအသုံးပြုသည်။
Mating connector အိမ်ရာ- PHR-5 Mating connector အဆက်အသွယ်များ- SPH-002T-P0.5S

3.3.8 မော်တော်ချိတ်ဆက်ကိရိယာနှင့် သတ်မှတ်ချက်များ
မော်တာချိတ်ဆက်မှုအတွက် 3.96mm pitch 4 pin connector ကို အသုံးပြုထားသည်။ မော်တာ ကွိုင်အကွေ့အကောက် နှစ်ခုစလုံး (bipolar stepper motor) သည် ဤချိတ်ဆက်ကိရိယာသို့ ချိတ်ဆက်ထားသည်။
မိတ်လိုက်ချိတ်ဆက်ကိရိယာ အိမ်ရာ- VHR-4N မိတ်လိုက်ချိတ်ဆက်ကိရိယာ အဆက်အသွယ်များ- BVH-21T-P1.1

4 Jumpers
ဘုတ်၏ ဆက်တင်အများစုကို ဆော့ဖ်ဝဲလ်မှတစ်ဆင့် လုပ်ဆောင်သည်။ မည်သို့ပင်ဆိုစေကာမူ၊ အနည်းငယ်သော jumpers များသည် configuration အတွက်ရနိုင်သည်။

4.1 RS485 Bus Termination
ဘုတ်တွင် RS120 အင်တာဖေ့စ်၏သင့်လျော်သောဘတ်စ်ကားရပ်စဲမှုအတွက် 485 Ohm ခုခံမှုတစ်ခုပါရှိသည်။ ဤ jumper ကိုပိတ်သောအခါ၊ RS485+ နှင့် RS485- ကွဲပြားသောဘတ်စ်ကားလိုင်းနှစ်ခုကြားတွင် resistor ကိုထားရှိမည်ဖြစ်သည်။
4.2 Bus Termination လုပ်နိုင်သည်။
ဘုတ်တွင် CAN အင်တာဖေ့စ်၏ သင့်လျော်သောဘတ်စ်ကားရပ်စဲမှုအတွက် 120 Ohm ခုခံမှုတစ်ခုပါရှိသည်။ ဤ jumper ကိုပိတ်သောအခါ၊ ကွဲပြားသောဘတ်စ်ကားလိုင်း CAN_H နှင့် CAN_L ကြားတွင် ခုခံအားကို ထားရှိမည်ဖြစ်သည်။
5 လည်ပတ်မှုအဆင့်သတ်မှတ်ချက်များ
အောက်တွင်ဖော်ပြထားသော လုပ်ငန်းဆောင်ရွက်မှုအဆင့်သတ်မှတ်ချက်များကို ဒီဇိုင်းတန်ဖိုးများအဖြစ် အသုံးပြုသင့်သည်။ မည်သည့်အခြေအနေတွင်မဆို လုပ်ဆောင်ချက်အတွင်း အမြင့်ဆုံးတန်ဖိုးများကို ကျော်လွန်သွားသင့်သည်။

*) controller driver electronics ကို 5.5°C ပတ်ဝန်းကျင် အပူချိန်တွင် air convection မပါဘဲ 30min အတွင်း လက်ရှိ (50A RMS) အပြည့်ဖြင့် လည်ပတ်နေသော ရာသီဥတုအခန်းအတွင်း စမ်းသပ်ထားပါသည်။
မော်တာသည် သင့်လျော်သောအအေးမပါဘဲ 50°C အထက်တွင် ကောင်းမွန်စွာ အပူရှိန်တက်သွားနိုင်သည်။ ၎င်းသည် အီလက်ထရွန်းနစ်ပစ္စည်းများအတွက် ပတ်ဝန်းကျင် အပူချိန်ကို သိသိသာသာ တိုးလာစေနိုင်သည်။ coolStep လည်ပတ်မှုမုဒ်ကို အသုံးပြုသောအခါ၊ အမှန်တကယ် လက်ရှိသည် ပရိုဂရမ်လုပ်ထားသည့် အမြင့်ဆုံးထက် သိသိသာသာ နည်းသွားနိုင်သည်။ လက်ရှိထုတ်လုပ်မှုနှင့် အပူချိန်။
6 လုပ်ဆောင်ချက်ဆိုင်ရာ ဖော်ပြချက်
ပုံ 7.1 တွင် PD86-1180 ၏ အဓိကအစိတ်အပိုင်းများကို ပြသထားသည်။ PANDdrive တွင် အဓိကအားဖြင့် µC (EEPROM TMCL မမ်မိုရီသို့ ချိတ်ဆက်ထားသည်)၊ TMC428/429 ရွေ့လျားမှုထိန်းချုပ်ကိရိယာ၊ TMC262A-PC ပါဝါဒရိုက်ဘာ၊ ၎င်း၏စွမ်းအင်ထိရောက်သော coolStep အင်္ဂါရပ်၊ ပြင်ပ MOSFET ဒရိုက်ဘာtage၊ QSH8618 stepper motor နှင့် ပေါင်းစပ်ထားသော sensOstep ကုဒ်ဒါ။ တနည်းအားဖြင့် ပြင်ပကုဒ်ပြောင်းကိရိယာကို ချိတ်ဆက်နိုင်သည်။ အမည်ခံထောက်ပံ့မှု voltages သည် 24VDC သို့မဟုတ် 48VDC ဖြစ်သည်။

6.1 စနစ်ဗိသုကာ
TMCM-1180 သည် TMCL (Trinamic Motion Control Language) လည်ပတ်မှုစနစ်နှင့် မိုက်ခရိုကွန်ထရိုလာကို ပေါင်းစပ်ထားသည်။ ရွေ့လျားမှုကို ထိန်းချုပ်သည့် အချိန်နှင့်တစ်ပြေးညီ လုပ်ဆောင်ချက်များကို TMC428/429 မှ နားလည်သဘောပေါက်ပါသည်။
မိုက်ခရိုကွန်ထရိုး ၁
ဤ module တွင်၊ Atmel AT91SAM7X256 ကို TMCL လည်ပတ်မှုစနစ်လည်ပတ်ရန်နှင့် TMC428/429 ကိုထိန်းချုပ်ရန်အတွက်အသုံးပြုသည်။ CPU တွင် 256KB flash memory နှင့် 64KB RAM ရှိသည်။ microcontroller သည် RS232, RS485, USB, သို့မဟုတ် CAN interface မှတဆင့် host မှ module သို့ပေးပို့သော TMCL commands များကို လုပ်ဆောင်နိုင်စေသည့် TMCL (Trinamic Motion Control Language) လည်ပတ်မှုစနစ်အား လုပ်ဆောင်ပါသည်။ မိုက်ခရိုကွန်ထရိုလာသည် TMCL ညွှန်ကြားချက်များကို ဘာသာပြန်ပေးပြီး ရွေ့လျားမှုဆိုင်ရာ ညွှန်ကြားချက်များကို လုပ်ဆောင်သည့် TMC428/429 ကို ထိန်းချုပ်သည်။ ထို့အပြင် ၎င်းကို ကုဒ်ပြောင်းသည့် အင်တာဖေ့စ်နှင့် ချိတ်ဆက်ထားပြီး ထည့်သွင်းမှုများကို လုပ်ဆောင်သည်။ microcontroller ၏ flash ROM သည် TMCL လည်ပတ်မှုစနစ်ကို ကိုင်ဆောင်ထားသည်။ TMCL လည်ပတ်မှုစနစ်ကို RS232 အင်တာဖေ့စ်မှတစ်ဆင့် သို့မဟုတ် CAN မျက်နှာပြင်မှတစ်ဆင့် အပ်ဒိတ်လုပ်နိုင်သည်။ ဒါကိုလုပ်ဖို့ TMCL-IDE ကိုသုံးပါ။
6.1.2 EEPROM
သီးခြားလုပ်ဆောင်မှုအတွက် TMCL ပရိုဂရမ်များကို သိမ်းဆည်းရန် TMCM-1180 မော်ဂျူးတွင် မိုက်ခရိုကွန်ထရိုလာနှင့် ချိတ်ဆက်ထားသည့် 16kByte EEPROM တပ်ဆင်ထားသည်။ EEPROM သည် 2048 TMCL အမိန့်များအထိပါဝင်သော TMCL ပရိုဂရမ်များကို သိမ်းဆည်းနိုင်သည်။ EEPROM ကို configuration data များသိမ်းဆည်းရန်အတွက်လည်းအသုံးပြုသည်။
6.1.3 ရွေ့လျားမှု ထိန်းချုပ်ကိရိယာ
TMC428/429 သည် စွမ်းဆောင်ရည်မြင့် stepper motor control IC ဖြစ်ပြီး 2-phase-stepper-motors သုံးခုအထိ ထိန်းချုပ်နိုင်သည်။ အမြန်နှုန်း သို့မဟုတ် အရှိန်ကဲ့သို့သော ရွေ့လျားမှုဆိုင်ရာ ကန့်သတ်ချက်များကို မိုက်ခရိုကွန်ထရိုလာမှ SPI မှတစ်ဆင့် TMC428/429 သို့ ပေးပို့သည်။ r ၏တွက်ချက်မှုamps နှင့် speed profiles ကို ပစ်မှတ်ရွေ့လျားမှု ကန့်သတ်ချက်များအပေါ် အခြေခံ၍ ဟာ့ဒ်ဝဲဖြင့် အတွင်းပိုင်းကို လုပ်ဆောင်သည်။
6.1.4 Stepper Motor Driver
TMC262A-PC သည် bipolar stepper မော်တာများအတွက် စွမ်းအင်သက်သာသော မြင့်မားသော လက်ရှိ တိကျသော microstepping driver IC တစ်ခုဖြစ်သည်။ TMCM-1180 module ရှိ ဤဒရိုက်ဘာသည် QSH262 မော်တာများဖြင့် PANDrives အတွက် TMC8618 ပါဝါဒရိုက်ဗာ၏ အထူးဗားရှင်းဖြစ်သည်။
၎င်း၏ထူးခြားသောအရည်အသွေးမြင့်အာရုံခံကိရိယာမဲ့ဝန်ထောက်လှမ်းခြင်း stallGuard2 ကို coolStep ဟုခေါ်သော အထူးပေါင်းစပ်ဝန်အားမှီခိုသည့်လက်ရှိထိန်းချုပ်မှုအင်္ဂါရပ်အတွက်အသုံးပြုသည်။ ဝန်ကိုဖတ်ပြီး ဝန်ပိုနေခြင်းကို ထောက်လှမ်းနိုင်မှုသည် TMC262 သည် မြင့်မားသောယုံကြည်စိတ်ချရမှုကိုလိုချင်သည့် drives များအတွက် အကောင်းဆုံးရွေးချယ်မှုဖြစ်စေသည်။ TMC262 ကို ခြေလှမ်း/လမ်းညွှန် အချက်ပြမှုများဖြင့် မောင်းနှင်နိုင်ပြီး အမှတ်စဉ် SPITM ဖြင့် မောင်းနှင်နိုင်သည်။

coolStep လက်ရှိ ထိန်းညှိပေးသည့်စနစ်သည် ယာဉ်မောင်း၏ ဝန်တိုးခြင်း သို့မဟုတ် လျှော့ချခြင်းအပေါ် တုံ့ပြန်မှုကို ထိန်းချုပ်ရန် ခွင့်ပြုသည်။ အတွင်းပိုင်း ထိန်းညှိကိရိယာသည် အကောင်းဆုံး မော်တာလည်ပတ်မှုအတွက် အနိမ့်ဆုံးနှင့် အမြင့်ဆုံးဝန်ထောင့်ကို ဆုံးဖြတ်ရန် အဆင့်နှစ်ခုကို အသုံးပြုသည်။ လက်ရှိ တိုးနှုန်းနှင့် လက်ရှိ လျှော့ချမှု အမြန်နှုန်းကို အပလီကေးရှင်းနှင့် လိုက်လျောညီထွေဖြစ်စေနိုင်သည်။ ထို့အပြင်၊ လက်ရှိစကေးပါရာမီတာ CS မှ သတ်မှတ်ထားသော အထက်လက်ရှိကန့်သတ်ချက်နှင့် ဆက်စပ်၍ အောက်လက်ရှိကန့်သတ်ချက်ကို သတ်မှတ်နိုင်သည်။
6.1.5 sensOstep ကုဒ်ဒါ
ဤယူနစ်တွင်အသုံးပြုသည့် sensOstep ကုဒ်ဒါသည် ရုပ်ထွက်နိမ့်သော သံလိုက်ထောင့်အနေအထားကုဒ်ဒါစနစ်အပေါ် အခြေခံထားသည်။ ၎င်းတွင် stepper မော်တာဝင်ရိုး၏နောက်ဘက်တွင် သေးငယ်သော သံလိုက်တစ်ခုနှင့် ပေါင်းစပ်ဒစ်ဂျစ်တယ်အချက်ပြလုပ်ဆောင်ခြင်း (ဥပမာ- အလိုအလျောက်ရရှိမှုထိန်းချုပ်မှု၊ အပူချိန်လျော်ကြေးပေးခြင်းစသည်) ပါဝင်သော Hall-sensor IC တစ်ခုတို့ပါ၀င်ပါသည်။ တပ်ဆင်ထားသော ပုံနှိပ်ဆားကစ်ဘုတ်။ ကုဒ်ဒါသည် ပုံမှန် 8° stepper မော်တာများဖြင့် ခြေလှမ်းဆုံးရှုံးမှုများကို ထောက်လှမ်းရန်အတွက် လုံးဝလုံလောက်သော တော်လှန်ရေးတစ်ခုလျှင် 256 bit (1.8 လှမ်း) ပြတ်သားမှုအား ပေးပါသည်။
7 TMCM-1180 စစ်ဆင်ရေးဖော်ပြချက်
7.1 တွက်ချက်မှု- အလျင်နှင့် အရှိန်နှင့် ယှဉ်၍ Microstep နှင့် Fullstep Frequency
TMC428/429 သို့ ပေးပို့သော ဘောင်များ၏ တန်ဖိုးများသည် တစ်စက္ကန့်လျှင် အလျင်ကဲ့သို့ လည်ပတ်ခြင်းကဲ့သို့ ပုံမှန် မော်တာတန်ဖိုးများ မရှိပါ။ သို့သော် ဤကဏ္ဍတွင် ပြထားသည့်အတိုင်း ဤတန်ဖိုးများကို TMC428/429 ဘောင်များမှ တွက်ချက်နိုင်သည်။


8 TMCL
TMCL၊ TRINAMIC ရွေ့လျားမှုထိန်းချုပ်ရေးဘာသာစကားကို သီးခြားစာရွက်စာတမ်းများတွင် ဖော်ပြထားပြီး၊ သီးခြားထုတ်ကုန်များ (ဥပမာ TMCM-1180 TMCL Firmware Manual) ကိုရည်ညွှန်းပါသည်။ လက်စွဲစာအုပ်များကို www.trinamic.com တွင်ပေးထားသည်။ မွမ်းမံထားသော ဒေတာစာရွက်များနှင့် အပလီကေးရှင်းမှတ်စုများအတွက် ဤရင်းမြစ်ကို ကိုးကားပါ။
9 CANOpen
TMCM-1180 module ကို အနာဂတ်ဗားရှင်းများတွင် CANopen protocol နှင့်လည်း အသုံးပြုသင့်ပါသည်။ ဤရည်ရွယ်ချက်အတွက်၊ အထူး CANopen Firmware ကို တည်ဆောက်ဆဲဖြစ်သည်။ ဤရွေးချယ်မှုကို စိတ်ဝင်စားပါက TRINAMIC သို့ ဆက်သွယ်ပါ။
10 အသက်ကယ်ထောက်ပံ့ရေးမူဝါဒ
TRINAMIC Motion Control GmbH & Co. KG သည် TRINAMIC Motion Control GmbH & Co. KG ၏ သီးခြားစာဖြင့်ရေးသားထားသော ခွင့်ပြုချက်မရှိဘဲ ၎င်း၏ထုတ်ကုန်များကို အသက်ကယ်ထောက်ပံ့မှုစနစ်များတွင် အသုံးပြုရန်အတွက် ခွင့်ပြုခြင်း သို့မဟုတ် အာမခံပေးခြင်း မရှိပါ။
အသက်ကယ် ထောက်ပံ့ရေးစနစ်များသည် အသက်ကို ထောက်ပံ့ရန် သို့မဟုတ် ရှင်သန်ရန် ရည်ရွယ်သည့် ကိရိယာများဖြစ်ပြီး၊ ပေးထားသည့် ညွှန်ကြားချက်များနှင့်အညီ စနစ်တကျ အသုံးပြုပါက ပျက်ကွက်ပါက ပုဂ္ဂိုလ်ရေး ထိခိုက်မှု သို့မဟုတ် သေဆုံးခြင်းအထိ ဖြစ်နိုင်သည်ဟု ကျိုးကြောင်းဆီလျော်စွာ မျှော်လင့်နိုင်သည်။
© TRINAMIC Motion Control GmbH & Co. KG 2013 ဤဒေတာစာရွက်တွင် ပေးထားသော အချက်အလက်များသည် တိကျပြီး ယုံကြည်စိတ်ချရသည်ဟု ယူဆပါသည်။ သို့ရာတွင် ၎င်း၏အသုံးပြုမှု၏အကျိုးဆက်များ၊ မူပိုင်ခွင့်များ သို့မဟုတ် အခြားတတိယပါတီများ၏အခွင့်အရေးများကို ချိုးဖောက်မှုများအတွက် တာဝန်မထမ်းဆောင်ရပါ။ သတ်မှတ်ချက်များသည် အသိပေးခြင်းမရှိဘဲ ပြောင်းလဲနိုင်သည်။ အသုံးပြုထားသော ကုန်အမှတ်တံဆိပ်အားလုံးသည် သက်ဆိုင်ရာပိုင်ရှင်များ၏ ပိုင်ဆိုင်မှုဖြစ်သည်။

11 ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
11.1 Hardware ပြန်လည်ပြင်ဆင်ခြင်း။

11.2 Hardware ပြန်လည်ပြင်ဆင်ခြင်း။

12 အကိုးအကား
[TMCM-1180 / PD86-1180 TMCL] TMCM-1180 နှင့် PD86-1180 TMCL Firmware Manual[TMCL-IDE] TMCL-IDE အသုံးပြုသူလက်စွဲ
[QSH8618] QSH8618 လက်စွဲစာအုပ်
ကိုးကားပါ။ www.trinamic.com.
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
TRINAMIC TMCM-1180 Stepper Motor Controller [pdf] အသုံးပြုသူလမ်းညွှန် TMCM-1180 Stepper Motor Controller၊ TMCM-1180၊ Stepper Motor Controller၊ Motor Controller၊ Controller |