STMicroelectronics VL53L5CX Multizone Time of Flight Ranging Sensor

နိဒါန်း
ဤအသုံးပြုသူလက်စွဲ၏ရည်ရွယ်ချက်မှာ ultra lite driver (ULD) API ကိုအသုံးပြု၍ VL53L5CX Time-of-Flight (ToF) အာရုံခံကိရိယာကို မည်သို့ကိုင်တွယ်ရမည်ကို ရှင်းပြရန်ဖြစ်သည်။ ၎င်းသည် စက်ပစ္စည်းကို ပရိုဂရမ်၊ ချိန်ညှိမှုများနှင့် အထွက်ရလဒ်များကို လုပ်ဆောင်ရန် အဓိကလုပ်ဆောင်ချက်များကို ဖော်ပြသည်။
VL53L5CX သည် STMicroelectronics Flight Sense ထုတ်ကုန်မိသားစုကို မြှင့်တင်ပေးသည့် ToF၊ multizone range အာရုံခံကိရိယာသည် အနုပညာဆန်သောအခြေအနေတစ်ခုဖြစ်သည်။ သေးငယ်သောပြန်ထွက်နိုင်သော ပက်ကေ့ဂျ်တွင် ထည့်သွင်းထားသောကြောင့် ၎င်းသည် SPAD အခင်းအကျင်း၊ ရုပ်ပိုင်းဆိုင်ရာ အနီအောက်ရောင်ခြည် စစ်ထုတ်မှုများနှင့် အလင်းအမှောင် အလင်းပြန်သည့် အစိတ်အပိုင်းများ (DOE) တို့ကို ပေါင်းစပ်ကာ ဖန်သားဖုံးမှန်ပစ္စည်းများ အမျိုးမျိုးဖြင့် ပတ်ဝန်းကျင်အလင်းရောင်အခြေအနေများတွင် အကောင်းဆုံးစွမ်းဆောင်ရည်ကို ရရှိစေပါသည်။
Multizone အကွာအဝေးတိုင်းတာခြင်းများသည် ကျယ်ပြန့်သော 8° ထောင့်ဖြတ်အကွက်ဖြင့် 8×63 ဇုန်အထိ ဖြစ်နိုင်သည်။ view (FoV) ဟူသည် ဖြစ်နိုင်သည်။
ဆော့ဖ်ဝဲလ်ဖြင့်လျှော့ချသည်။ VL53L5CX ၏ဇုန်တစ်ခုစီသည် အမြင့်ဆုံးကြိမ်နှုန်း 4 Hz တွင် ပစ်မှတ်၏အကွာအဝေးကို 60 မီတာအထိတိုင်းတာသည်။
STMicroelectronics မူပိုင်ခွင့်ရရှိထားသော histogram algorithms ကြောင့် VL53L5CX သည် FoV အတွင်း မတူညီသော အရာဝတ္ထုများကို ရှာဖွေတွေ့ရှိနိုင်မည်ဖြစ်သည်။
histogram သည် 60 cm ထက်ကျော်လွန်သော glass crosstalk ကို ဖုံးအုပ်ရန် ကိုယ်ခံစွမ်းအားကို ပေးပါသည်။

ကိုးကား
VL53L5CX ဒေတာစာရွက် (DS13754)။
အတိုကောက်များနှင့် အတိုကောက်များ
| အတိုကောက်/အတိုကောက် | အဓိပ္ပါယ် |
| DOE | diffractive optical ဒြပ်စင် |
| FoV | နယ်ပယ် view |
| I²C | inter-integrated circuit (serial bus) |
| Kcps/SPAD | spad တစ်ခုအတွက် တစ်စက္ကန့်လျှင် ကီလို-ရေတွက်ခြင်း (SPAD ခင်းကျင်းတွင် ဖိုတွန်အရေအတွက်ကို တိုင်းတာရန် အသုံးပြုသည့် ယူနစ်) |
| ရမ် | random-access memory |
| SCL | အမှတ်စဉ်နာရီလိုင်း |
| SDA | အမှတ်စဉ်ဒေတာ |
| SPAD | တစ်ခုတည်းသောဖိုတွန် avalanche diode |
| ToF | ပျံသန်းချိန် |
| ULD | ultra lite ယာဉ်မောင်း |
| VCSEL | vertical cavity မျက်နှာပြင် emitting diode |
| VHV | အလွန်မြင့်မားသော voltage |
| Xtalk | crosstalk |
လုပ်ဆောင်ချက်ဆိုင်ရာ ဖော်ပြချက်
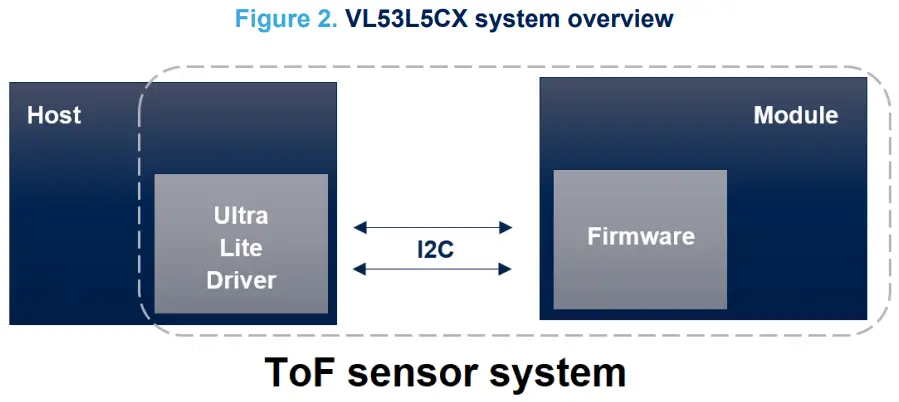
စနစ်ပြီးပါပြီ။view
VL53L5CX စနစ်သည် ဟာ့ဒ်ဝဲ မော်ဂျူးတစ်ခုနှင့် host တစ်ခုပေါ်တွင် လုပ်ဆောင်နေသည့် ultra lite driver software (VL53L5CX ULD) တို့ ပါဝင်သည် (အောက်ပုံတွင်ကြည့်ပါ)။ ဟာ့ဒ်ဝဲ module တွင် ToF အာရုံခံကိရိယာပါရှိသည်။ STMicroelectronics သည် ဤစာရွက်စာတမ်းတွင် "ဒရိုင်ဘာ" ဟုရည်ညွှန်းထားသည့် ဆော့ဖ်ဝဲဒရိုက်ဗာကို ပို့ဆောင်ပေးပါသည်။ ဤစာရွက်စာတမ်းသည် host မှအသုံးပြုနိုင်သော driver ၏လုပ်ဆောင်ချက်များကိုဖော်ပြသည်။ ဤလုပ်ဆောင်ချက်များသည် အာရုံခံကိရိယာကို ထိန်းချုပ်ပြီး အတိုင်းအတာဒေတာကို ရယူသည်။
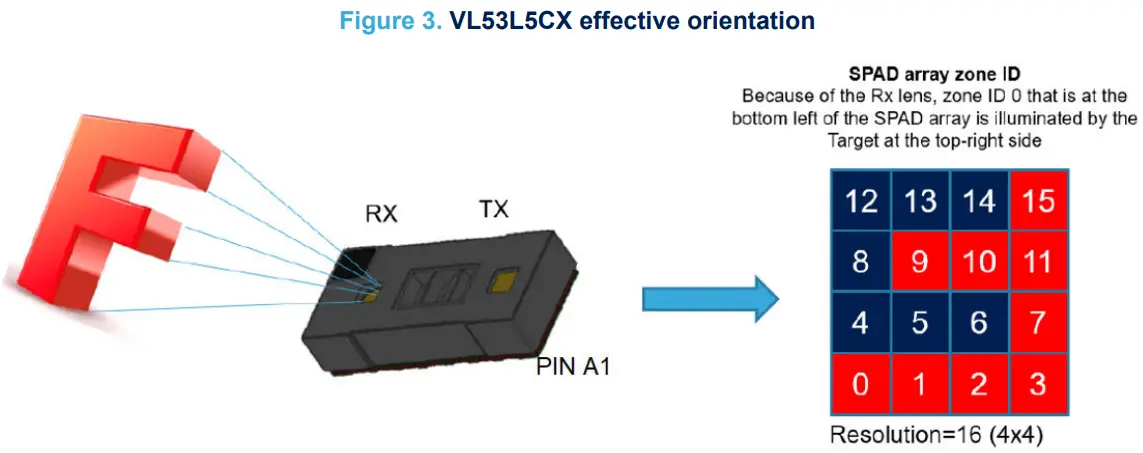
ထိရောက်သောဦးတည်ချက်
မော်ဂျူးတွင် ပစ်မှတ်၏ ဖမ်းယူထားသော ပုံကို (အလျားလိုက်နှင့် ဒေါင်လိုက်) လှန်ပေးသော Rx အလင်းဝင်ပေါက်ကျော် မှန်ဘီလူးတစ်ခု ပါဝင်သည်။ ထို့ကြောင့် SPAD အခင်းအကျင်း၏ဘယ်ဘက်အောက်ခြေရှိ ဇုန် 0 အဖြစ်သတ်မှတ်ထားသောဇုန်သည် အခင်းဖြစ်ပွားရာ၏ညာဘက်အပေါ်ဘက်တွင်ရှိသောပစ်မှတ်တစ်ခုဖြင့်လင်းနေပါသည်။
Schematics နှင့် I²C ဖွဲ့စည်းမှု
Driver နှင့် Firmware အကြား ဆက်သွယ်ရေးကို 1 MHz အထိ လည်ပတ်နိုင်သော စွမ်းရည်ဖြင့် I²C မှ ကိုင်တွယ်ပါသည်။ အကောင်အထည်ဖော်မှုတွင် SCL နှင့် SDA လိုင်းများပေါ်တွင် ဆွဲတင်မှုများ လိုအပ်သည်။ နောက်ထပ်အချက်အလက်များအတွက် VL53L5CX ဒေတာစာရွက်ကို ကိုးကားပါ။
VL53L5CX စက်ပစ္စည်းတွင် မူရင်း I²C လိပ်စာ 0x52 ရှိသည်။ သို့ရာတွင်၊ အခြားစက်ပစ္စည်းများနှင့် ပဋိပက္ခများကိုရှောင်ရှားရန် မူရင်းလိပ်စာကို ပြောင်းလဲနိုင်သည် သို့မဟုတ် ပိုမိုကောင်းမွန်သောစနစ် FoV အတွက် စနစ်သို့ VL53L5CX မော်ဂျူးများစွာကို ထည့်သွင်းရာတွင် လွယ်ကူချောမွေ့စေနိုင်သည်။ vl53l5cx_set_i2c_address() လုပ်ဆောင်ချက်ကို အသုံးပြု၍ I²C လိပ်စာကို ပြောင်းလဲနိုင်သည်။
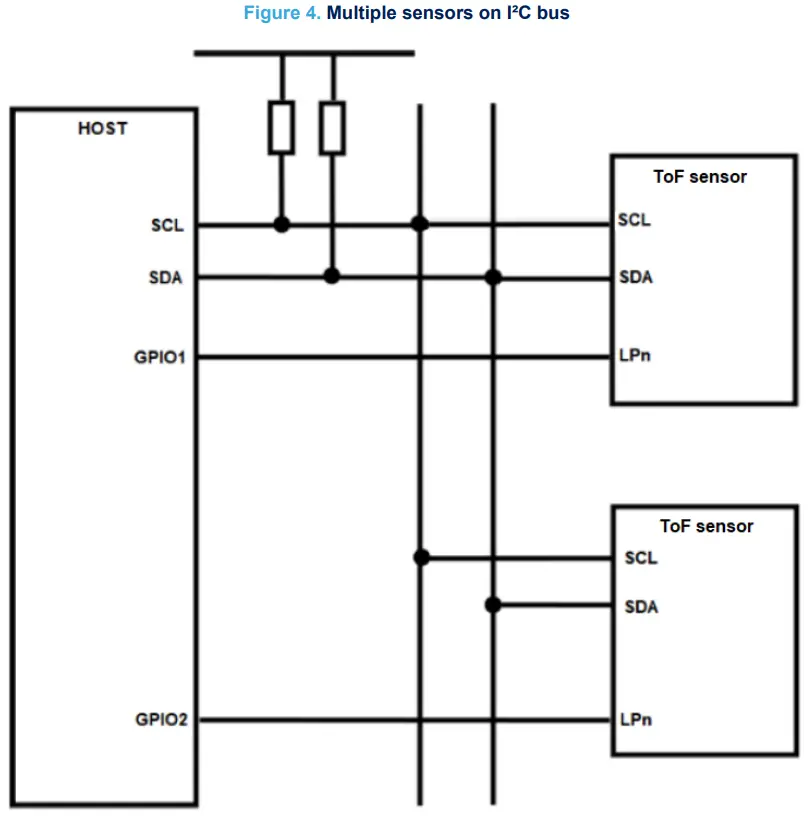
I²C ဘတ်စ်ကားပေါ်တွင် အခြားသူများကို မထိခိုက်စေဘဲ ၎င်း၏ I²C လိပ်စာကို ပြောင်းလဲခွင့်ပြုရန်၊ ပြောင်းလဲခြင်းမရှိသည့် စက်ပစ္စည်းများ၏ I²C ဆက်သွယ်ရေးကို ပိတ်ရန် အရေးကြီးပါသည်။ လုပ်ထုံးလုပ်နည်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။
- စနစ်ကို ပုံမှန်အတိုင်း ပါဝါဖွင့်ပါ။
- ၎င်း၏လိပ်စာပြောင်းမည်မဟုတ်သော စက်၏ LPn ပင်ကို ဆွဲချပါ။
- I²C လိပ်စာပြောင်းထားသော စက်၏ LPn ပင်ကို ဆွဲယူပါ။
- လုပ်ဆောင်ချက် set_i2c_address() လုပ်ဆောင်ချက်ကို အသုံးပြု၍ စက်ပစ္စည်းသို့ I²C လိပ်စာကို အစီအစဉ်ချပါ။
- ပြန်လည်အစီအစဉ်မချဘဲ စက်၏ LPn ပင်ကို ဆွဲယူပါ။
စက်ပစ္စည်းအားလုံးကို I²C ဘတ်စ်ကားပေါ်တွင် ယခု ရနိုင်ရပါမည်။ I²C လိပ်စာအသစ်လိုအပ်သော စနစ်ရှိ VL53L5CX စက်များအားလုံးအတွက် အထက်ပါအဆင့်များကို ပြန်လုပ်ပါ။
Package အကြောင်းအရာနှင့် ဒေတာစီးဆင်းမှု
ယာဉ်မောင်းဗိသုကာနှင့်အကြောင်းအရာ
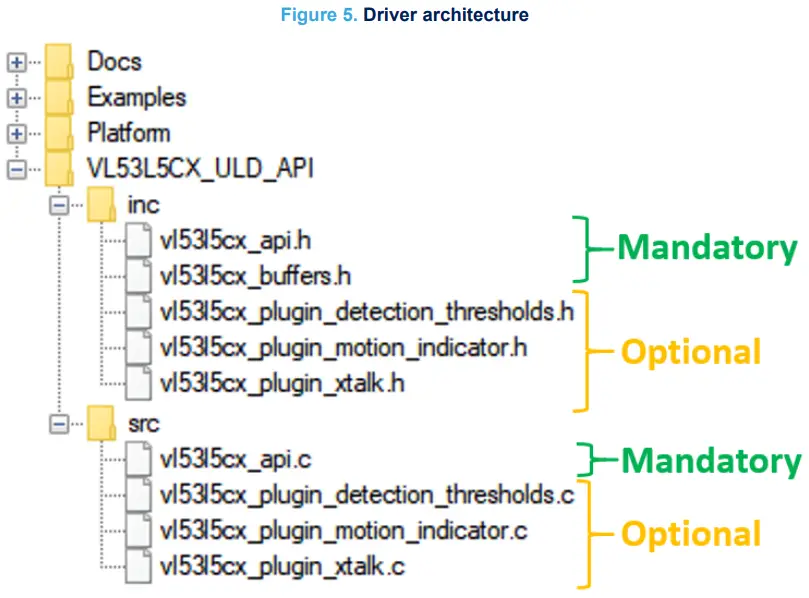
VL53L5CX ULD ပက်ကေ့ဂျ်သည် ဖိုဒါလေးခုဖြင့် ဖွဲ့စည်းထားသည်။ ယာဉ်မောင်းသည် / VL53L5CX_ULD_API ဖိုင်တွဲတွင် တည်ရှိသည်။
ယာဉ်မောင်းသည် မဖြစ်မနေ နှင့် ရွေးချယ်နိုင်သည် file၎။ ရွေးချယ်ခွင့် file၎ plugins ULD အင်္ဂါရပ်များကို တိုးချဲ့ရန် အသုံးပြုသည်။
ပလပ်အင်တစ်ခုစီသည် “vl53l5cx_plugin” ဟူသော စကားလုံးဖြင့် စတင်သည် (ဥပမာ vl53l5cx_plugin_xtalk.h)။ အကယ်၍ အသုံးပြုသူသည် အဆိုပြုချက်ကို မလိုလားပါ။ plugins၎င်းတို့သည် အခြားယာဉ်မောင်းအင်္ဂါရပ်များကို မထိခိုက်စေဘဲ ဖယ်ရှားနိုင်သည်။ အောက်ပါပုံသည် မဖြစ်မနေ ကိုယ်စားပြုသည်။ files နှင့် optional ကို plugins.
အသုံးပြုသူ နှစ်ဦးကိုလည်း အကောင်အထည်ဖော်ရန် လိုအပ်သည်။ files သည် /Platform folder တွင်တည်ရှိသည်။ အဆိုပြုထားသော ပလပ်ဖောင်းသည် အခွံအလွတ်တစ်ခုဖြစ်ပြီး သီးသန့်လုပ်ဆောင်ချက်များဖြင့် ပြည့်နေရပါမည်။
မှတ်ချက် - ပလပ်ဖောင်း.h file ULD ကို အသုံးပြုရန် မဖြစ်မနေ မက်ခရိုများ ပါရှိသည်။ အရာအားလုံး file ULD ကို မှန်မှန်ကန်ကန်သုံးရန် အကြောင်းအရာသည် မဖြစ်မနေလိုအပ်ပါသည်။
ကိုက်ညှိစီးဆင်းမှု
Crosstalk (Xtalk) ကို SPAD ခင်းကျင်းတွင် လက်ခံရရှိသည့် အချက်ပြပမာဏအဖြစ် သတ်မှတ်သည်၊ ၎င်းမှာ အကာအကွယ်ပြတင်းပေါက် (ကာဗာမှန်) အတွင်းတွင် ထည့်သွင်းထားသော VCSEL အလင်းပြန်မှုကြောင့်ဖြစ်သည်။ VL53L5CX မော်ဂျူးကို ကိုယ်တိုင်ချိန်ညှိထားပြီး နောက်ထပ် ချိန်ညှိခြင်းမရှိဘဲ အသုံးပြုနိုင်ပါသည်။
မော်ဂျူးကို အဖုံးမှန်ဖြင့် ကာကွယ်ထားလျှင် Crosstalk ချိန်ညှိမှု လိုအပ်နိုင်သည်။ VL53L5CX သည် histogram algorithm ကြောင့် 60 စင်တီမီတာထက် ကျော်လွန်ပြီး crosstalk ကို ခုခံနိုင်စွမ်းရှိသည်။ သို့သော်၊ 60 စင်တီမီတာအောက် အကွာအဝေးတွင်၊ Xtalk သည် အမှန်တကယ်ပြန်လာသော signal ထက် ပိုကြီးနိုင်သည်။ ၎င်းသည် မှားယွင်းသောပစ်မှတ်ကိုဖတ်ခြင်း သို့မဟုတ် ပစ်မှတ်များကို ၎င်းတို့အမှန်တကယ်ထက်ပိုမိုနီးကပ်စေပါသည်။ crosstalk ချိန်ညှိခြင်း လုပ်ဆောင်ချက်များအားလုံးကို Xtalk ပလပ်အင် (ချန်လှပ်ထားနိုင်သည်) တွင် ထည့်သွင်းထားသည်။ အသုံးပြုသူအနေဖြင့် အသုံးပြုရန် လိုအပ်ပါသည်။ file 'vl53l5cx_plugin_xtalk'။
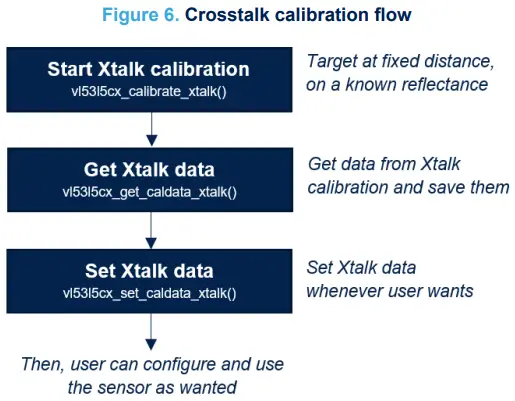
crosstalk ကို တစ်ကြိမ် ချိန်ညှိနိုင်ပြီး ဒေတာကို သိမ်းဆည်းထားနိုင်သောကြောင့် ၎င်းကို နောက်ပိုင်းတွင် ပြန်လည်အသုံးပြုနိုင်ပါသည်။ သတ်မှတ်ထားသော အကွာအဝေးရှိ ပစ်မှတ်တစ်ခုအား သိရှိထားသော ရောင်ပြန်ဟပ်မှု လိုအပ်ပါသည်။ လိုအပ်သော အနိမ့်ဆုံးအကွာအဝေးသည် 600 မီလီမီတာဖြစ်ပြီး ပစ်မှတ်သည် FoV တစ်ခုလုံးကို ဖုံးအုပ်ထားရမည်ဖြစ်သည်။ စနစ်ထည့်သွင်းမှုအပေါ်မူတည်၍ အသုံးပြုသူသည် အောက်ပါဇယားတွင်အဆိုပြုထားသည့်အတိုင်း crosstalk ချိန်ညှိမှုကို လိုက်လျောညီထွေဖြစ်အောင် ဆက်တင်များကို ပြင်ဆင်နိုင်သည်။
စားပွဲ 1. ချိန်ညှိခြင်းအတွက် ရနိုင်သော ဆက်တင်များ
| ဆက်တင် | မင်း | STMicroelectronics မှအဆိုပြုသည်။ | မက်တယ်။ |
| အကွာအဝေး [mm] | 600 | 600 | 3000 |
| ၎amples | 1 | 4 | 16 |
| အလင်းပြန်မှု [%] | 1 | 3 | 99 |
မှတ်ချက် - s အရေအတွက်ကိုတိုးမြှင့်amples သည် တိကျမှုကို တိုးစေသည်၊ သို့သော် ချိန်ညှိရန် အချိန်ကိုလည်း တိုးစေသည်။ အချိန်သည် s အရေအတွက်နှင့် ဆက်စပ်နေသည်။amples သည် linear ဖြစ်ပြီး တန်ဖိုးများသည် အနီးစပ်ဆုံး အချိန်ကုန်ဆုံးမှုနောက်တွင် လိုက်ပါသည်-
- ၅ ၎ample ≈ 1 စက္ကန့်
- ၅ ၎amples ≈ 2.5 စက္ကန့်
- ၅ ၎amples ≈ 8.5 စက္ကန့်
ချိန်ညှိခြင်းအား လုပ်ဆောင်ချက် vl53l5cx_calibrate_xtalk() ကို အသုံးပြု၍ လုပ်ဆောင်သည်။ ဤလုပ်ဆောင်ချက်ကို အချိန်မရွေးအသုံးပြုနိုင်ပါသည်။ သို့သော် အာရုံခံကိရိယာကို ဦးစွာ စတင်လုပ်ဆောင်ရပါမည်။ အောက်ပါပုံသည် crosstalk calibration flow ကို ကိုယ်စားပြုသည်။
Ranging စီးဆင်းမှု
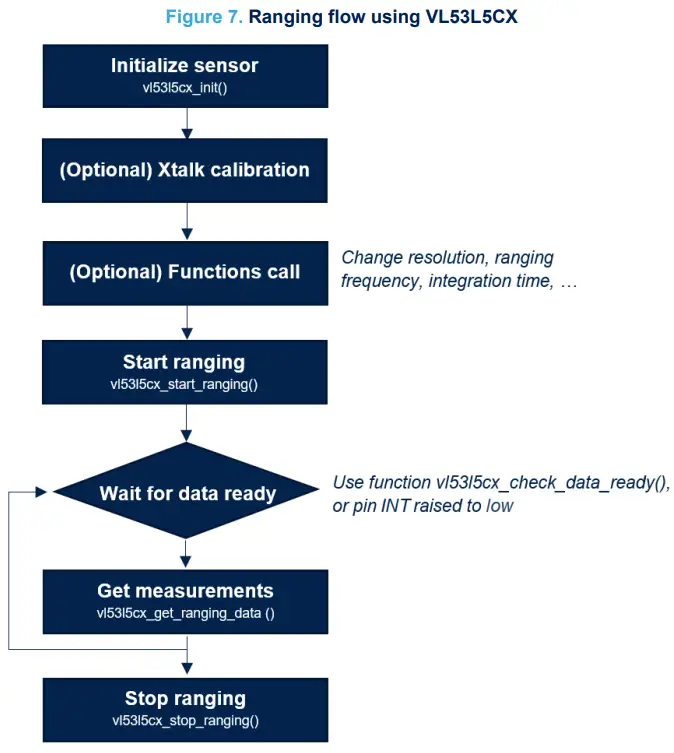
အောက်ပါပုံသည် တိုင်းတာမှုရယူရန် အသုံးပြုသည့် အတိုင်းအတာစီးဆင်းမှုကို ကိုယ်စားပြုသည်။ အပိုင်းအခြားအပိုင်းကို မစတင်မီ Xtalk ချိန်ညှိခြင်းနှင့် ရွေးချယ်နိုင်သော လုပ်ဆောင်ချက်ခေါ်ဆိုမှုများကို အသုံးပြုရပါမည်။ အပိုင်းအခြားတစ်ခုအတွင်း get/set လုပ်ဆောင်ချက်များကို အသုံးမပြုနိုင်ပါ၊ နှင့် 'on-the-fly' ပရိုဂရမ်ကို ပံ့ပိုးမထားပါ။
ရနိုင်သောအင်္ဂါရပ်များ
VL53L5CX ULD API တွင် အသုံးပြုသူအား အသုံးပြုမှုအခြေအနေပေါ်မူတည်၍ အာရုံခံကိရိယာကို ချိန်ညှိနိုင်စေသည့် လုပ်ဆောင်ချက်များစွာ ပါဝင်ပါသည်။ ယာဉ်မောင်းအတွက် ရနိုင်သောလုပ်ဆောင်ချက်အားလုံးကို အောက်ပါကဏ္ဍများတွင် ဖော်ပြထားပါသည်။
စတင်ခြင်း
VL53L5CX အာရုံခံကိရိယာကို အသုံးမပြုမီ ကနဦးလုပ်ဆောင်ရပါမည်။ ဤလုပ်ဆောင်ချက်သည် အသုံးပြုသူအား လိုအပ်သည်-
- အာရုံခံကိရိယာကို ပါဝါဖွင့်ပါ (VDDIO၊ AVDD၊ LPn ပင်များကို မြင့်ရန်သတ်မှတ်ထားပြီး ပင်နံပါတ် I2C_RST ကို 0 ဟုသတ်မှတ်ထားသည်)
- လုပ်ဆောင်ချက် vl53l5cx_init() ကို ခေါ်ပါ။ လုပ်ဆောင်ချက်သည် Firmware (~84 Kbytes) ကို module သို့ ကူးယူသည်။ I²C အင်တာဖေ့စ်ပေါ်ရှိ ကုဒ်ကို တင်ပြီး အစပြုခြင်း အပြီးသတ်ရန် boot ပုံမှန်အတိုင်း လုပ်ဆောင်ခြင်းဖြင့် ၎င်းကို လုပ်ဆောင်သည်။
အာရုံခံစနစ် ပြန်လည်သတ်မှတ်ခြင်း စီမံခန့်ခွဲမှု
စက်ပစ္စည်းကို ပြန်လည်သတ်မှတ်ရန်၊ အောက်ပါပင်နံပါတ်များကို ခလုတ်နှိပ်ရန် လိုအပ်သည်-
- ပင်နံပါတ် VDDIO၊ AVDD နှင့် LPn ပင်များကို နိမ့်စေရန် သတ်မှတ်ပါ။
- 10 ms စောင့်ပါ။
- ပင်နံပါတ် VDDIO၊ AVDD နှင့် LPn ပင်များကို အမြင့်တွင် သတ်မှတ်ပါ။
မှတ်ချက် - I2C_RST ပင်နံပါတ်ကိုသာ ခလုတ်ဖွင့်ခြင်းသည် I²C ဆက်သွယ်မှုကို ပြန်လည်သတ်မှတ်သည်။
ဆုံးဖြတ်ချက်
ကြည်လင်ပြတ်သားမှုသည် ရနိုင်သည့်ဇုန်အရေအတွက်နှင့် ကိုက်ညီသည်။ VL53L5CX အာရုံခံကိရိယာတွင် ဖြစ်နိုင်ချေ ပြတ်သားမှု နှစ်ခုရှိသည်- 4×4 (16 ဇုန်) နှင့် 8×8 (64 ဇုန်)။ ပုံမှန်အားဖြင့် အာရုံခံကိရိယာအား 4×4 ဖြင့် ပရိုဂရမ်ပြုလုပ်ထားသည်။
လုပ်ဆောင်ချက် vl53l5cx_set_resolution() သည် သုံးစွဲသူအား ကြည်လင်ပြတ်သားမှုကို ပြောင်းလဲရန် ခွင့်ပြုသည်။ အပိုင်းအခြား ကြိမ်နှုန်းသည် ကြည်လင်ပြတ်သားမှုအပေါ် မူတည်သောကြောင့်၊ အပိုင်းအခြား ကြိမ်နှုန်းကို မွမ်းမံခြင်းမပြုမီ ဤလုပ်ဆောင်ချက်ကို အသုံးပြုရပါမည်။ ထို့အပြင်၊ ပုံရိပ်ပြတ်သားမှုကိုပြောင်းလဲခြင်းသည် ရလဒ်များကိုဖတ်သည့်အခါ I²C ဘတ်စ်ကားပေါ်ရှိ ယာဉ်အသွားအလာအရွယ်အစားကိုလည်း တိုးစေသည်။
Ranging အကြိမ်ရေ
Ranging frequency ကို တိုင်းတာမှုကြိမ်နှုန်းကို ပြောင်းလဲရန် အသုံးပြုနိုင်သည်။ အမြင့်ဆုံးကြိမ်နှုန်းသည် 4×4 နှင့် 8×8 ကြည်လင်ပြတ်သားမှုကြားတွင် မတူညီသောကြောင့်၊ ကြည်လင်ပြတ်သားမှုကို ရွေးချယ်ပြီးနောက် ဤလုပ်ဆောင်ချက်ကို အသုံးပြုရန် လိုအပ်သည်။ အနိမ့်ဆုံးနှင့် အများဆုံး ခွင့်ပြုထားသော တန်ဖိုးများကို အောက်ပါဇယားတွင် ဖော်ပြထားပါသည်။
စားပွဲ 2. အနိမ့်ဆုံးနှင့် အများဆုံး ကြိမ်နှုန်းများ
| ဆုံးဖြတ်ချက် | အနည်းဆုံး အပိုင်းအခြား ကြိမ်နှုန်း [Hz] | အများဆုံး အပိုင်းအခြား ကြိမ်နှုန်း [Hz] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
လုပ်ဆောင်ချက် vl53l5cx_set_ranging_frequency_hz() ကို အသုံးပြု၍ အဆင့်သတ်မှတ်သည့် ကြိမ်နှုန်းကို အပ်ဒိတ်လုပ်နိုင်ပါသည်။ ပုံမှန်အားဖြင့်၊ အပိုင်းအခြားကြိမ်နှုန်းကို 1 Hz သို့ သတ်မှတ်ထားသည်။
အဆင့်သတ်မှတ်ခြင်းမုဒ်
အဆင့်သတ်မှတ်ခြင်းမုဒ်သည် သုံးစွဲသူအား စွမ်းဆောင်ရည်မြင့်မားသော သို့မဟုတ် ပါဝါသုံးစွဲမှုနည်းသော အမျိုးအစားများအကြား ရွေးချယ်နိုင်စေပါသည်။ အဆိုပြုထားသော မုဒ်နှစ်ခုရှိသည်။
- စဉ်ဆက်မပြတ်- စက်သည် အသုံးပြုသူမှသတ်မှတ်ထားသော ကြိမ်နှုန်းဖြင့်ဘောင်များကို အဆက်မပြတ်ဖမ်းယူသည်။ VCSEL ကို အဆင့်အားလုံးတွင် ဖွင့်ထားသောကြောင့် အမြင့်ဆုံး အကွာအဝေးနှင့် ပတ်ဝန်းကျင် ခုခံအားက ပိုကောင်းပါသည်။ ဤမုဒ်ကို လျင်မြန်သောအတိုင်းအတာတိုင်းတာမှုများ သို့မဟုတ် မြင့်မားသောစွမ်းဆောင်ရည်များအတွက် အကြံပြုထားသည်။
- ကိုယ်ပိုင်အုပ်ချုပ်ခွင့်- ဤသည်မှာ မူရင်းမုဒ်ဖြစ်သည်။ စက်ပစ္စည်းသည် အသုံးပြုသူမှသတ်မှတ်ထားသော ကြိမ်နှုန်းဖြင့်ဘောင်များကို ဆက်တိုက်ဖမ်းယူပါသည်။ လုပ်ဆောင်ချက် vl53l5cx_set_integration_time_ms() ကို အသုံးပြု၍ အသုံးပြုသူမှ သတ်မှတ်ထားသော ကာလတစ်ခုအတွင်း VCSEL ကို ဖွင့်ထားသည်။ VCSEL ကို အမြဲဖွင့်မထားသောကြောင့် ပါဝါသုံးစွဲမှု လျော့ကျသွားပါသည်။ အကြိမ်ရေ လျှော့ချခြင်းဖြင့် အကျိုးကျေးဇူးများ ပိုမိုထင်ရှားပါသည်။ ဤမုဒ်ကို ပါဝါနည်းသော အက်ပ်များအတွက် အကြံပြုထားသည်။
လုပ်ဆောင်ချက် vl53l5cx_set_ranging_mode() ကို အသုံးပြု၍ အပိုင်းအခြားမုဒ်ကို ပြောင်းလဲနိုင်သည်။
ပေါင်းစည်းချိန်
ပေါင်းစည်းခြင်းအချိန်သည် ကိုယ်ပိုင်အုပ်ချုပ်ခွင့် အပိုင်းအခြားမုဒ်ကို အသုံးပြု၍သာ ရနိုင်သော အင်္ဂါရပ်တစ်ခု (အပိုင်း 4.5- အဆင့်သတ်မှတ်မုဒ်ကို ကိုးကားပါ)။ VCSEL ကို ဖွင့်ထားစဉ်တွင် အသုံးပြုသူကို အချိန်ပြောင်းလဲနိုင်စေပါသည်။ အဆင့်သတ်မှတ်မုဒ်ကို စဉ်ဆက်မပြတ် သတ်မှတ်ထားပါက ပေါင်းစပ်ချိန်ကို ပြောင်းလဲခြင်းမှာ အကျိုးသက်ရောက်မှုမရှိပါ။ မူရင်းပေါင်းစည်းမှုအချိန်ကို 5 ms သတ်မှတ်ထားသည်။
ပေါင်းစပ်ချိန်၏အကျိုးသက်ရောက်မှုသည် 4×4 နှင့် 8×8 ပြတ်သားမှုများအတွက် ကွဲပြားသည်။ Resolution 4×4 ကို ပေါင်းစပ်ချိန်တစ်ခုဖြင့် ဖွဲ့စည်းထားပြီး 8×8 ကြည်လင်ပြတ်သားမှုကို ပေါင်းစည်းမှုအကြိမ် လေးကြိမ်ဖြင့် ဖွဲ့စည်းထားသည်။ အောက်ပါပုံများသည် ဆုံးဖြတ်ချက်နှစ်ခုလုံးအတွက် VCSEL ထုတ်လွှတ်မှုကို ကိုယ်စားပြုသည်။
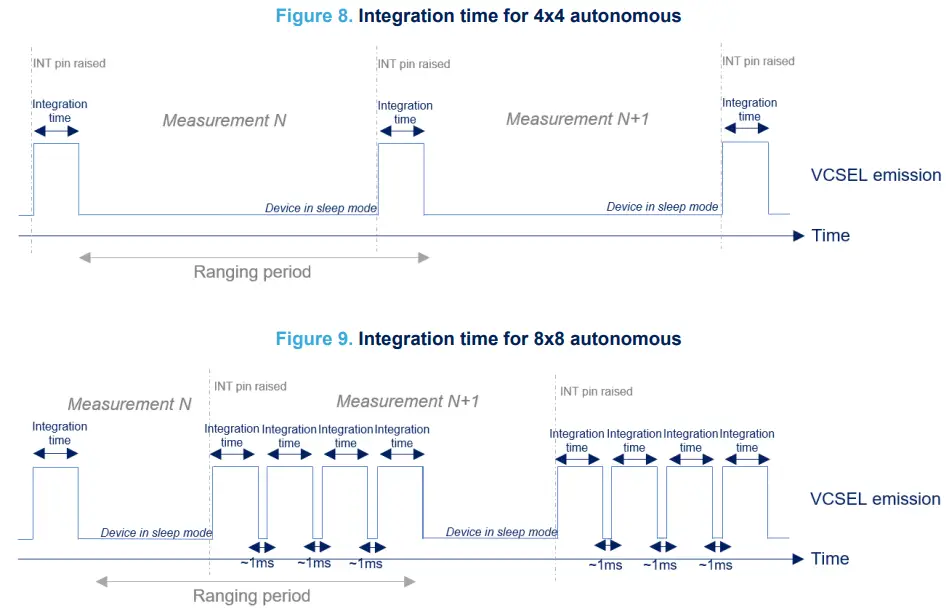
ပေါင်းစည်းမှုအကြိမ်အားလုံး၏ ပေါင်းလဒ် + 1 ms overhead သည် တိုင်းတာသည့်ကာလထက် နိမ့်နေရပါမည်။ မဟုတ်ပါက ကာလအပိုင်းအခြားသည် အလိုအလျောက် တိုးလာသည်။
ပါဝါမုဒ်များ
စက်ပစ္စည်းကို အသုံးမပြုသည့်အခါ ပါဝါသုံးစွဲမှုကို လျှော့ချရန် ပါဝါမုဒ်များကို အသုံးပြုနိုင်သည်။ VL53L5CX သည် အောက်ပါ ပါဝါမုဒ်များထဲမှ တစ်ခုတွင် လည်ပတ်နိုင်သည်-
- နိုးထခြင်း- ကိရိယာအား HP idle (ပါဝါမြင့်သော) တွင် တပ်ဆင်ထားပြီး ညွှန်ကြားချက်များကို စောင့်ဆိုင်းနေပါသည်။
- အိပ်စက်ခြင်း- စက်ပစ္စည်းအား LP idle (ပါဝါနည်းသော)၊ ပါဝါနိမ့်သောအခြေအနေတွင် သတ်မှတ်ထားသည်။ နိုးထမုဒ်တွင် သတ်မှတ်ထားသည့်တိုင်အောင် စက်ကို အသုံးမပြုနိုင်ပါ။
ဤမုဒ်တွင် firmware နှင့် configuration ကို ထိန်းသိမ်းထားသည်။
လုပ်ဆောင်ချက် vl53l5cx_set_power_mode() ကို အသုံးပြု၍ ပါဝါမုဒ်ကို ပြောင်းလဲနိုင်သည်။ မူရင်းမုဒ်သည် နှိုးစက်ဖြစ်သည်။
မှတ်ချက် - အသုံးပြုသူသည် ပါဝါမုဒ်ကို ပြောင်းလဲလိုပါက၊ စက်ပစ္စည်းသည် အတိုင်းအတာတစ်ခုအထိ ရှိမနေရပါ။
ချွန်စက်
ပစ်မှတ်မှ ပြန်လာသော အချက်ပြမှုသည် ချွန်ထက်သော အစွန်းများရှိသော သန့်ရှင်းသော သွေးခုန်နှုန်းမဟုတ်ပါ။ အစွန်းများသည် လျှောဆင်းသွားကာ ကပ်လျက်ဇုန်များရှိ အစီရင်ခံထားသော အကွာအဝေးများကို ထိခိုက်နိုင်သည်။ ချွန်စက်ကို ဖုံးအုပ်ထားသည့် အလင်းတန်းကြောင့် ဖြစ်ပေါ်လာသော အချက်ပြအချို့ သို့မဟုတ် အားလုံးကို ဖယ်ရှားရန်အတွက် အသုံးပြုသည်။
ရည်းစားဟောင်းampအောက်ဖော်ပြပါပုံတွင်ပြထားသည့် le သည် FoV တွင်ဗဟိုပြုထားသော 100 mm အနီးကပ်ပစ်မှတ်ကိုကိုယ်စားပြုပြီး 500 mm နောက်တွင် နောက်ထပ်ပစ်မှတ်တစ်ခုဖြစ်သည်။ ချွန်ထက်သောတန်ဖိုးပေါ် မူတည်၍ အနီးကပ်ပစ်မှတ်သည် အစစ်အမှန်ထက် ဇုန်များပိုမိုတွင် ပေါ်လာနိုင်သည်။
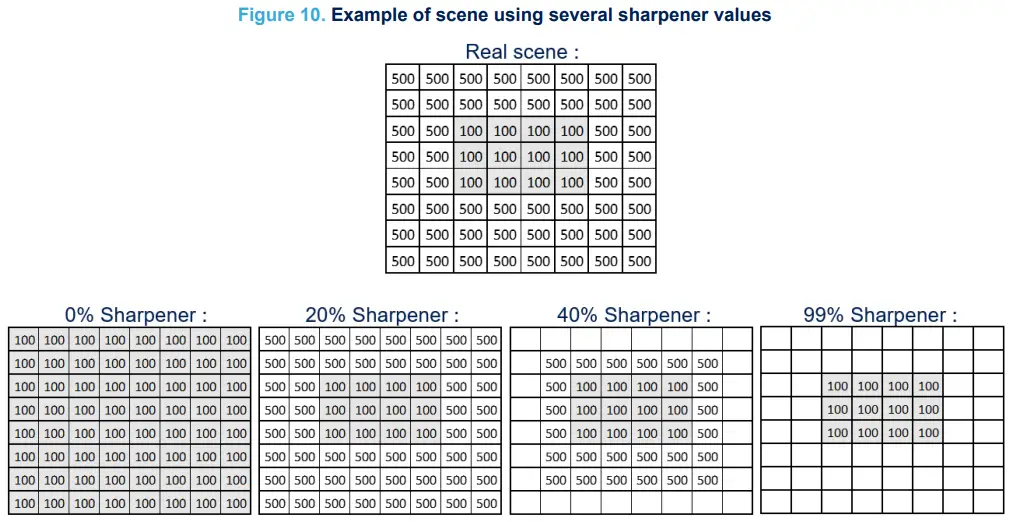
လုပ်ဆောင်ချက် vl53l5cx_set_sharpener_percent() ကို အသုံးပြု၍ ချွန်စက်ကို ပြောင်းလဲနိုင်သည်။ ခွင့်ပြုထားသောတန်ဖိုးများသည် 0% နှင့် 99% ကြားဖြစ်သည်။ မူရင်းတန်ဖိုးသည် 5% ဖြစ်သည်။
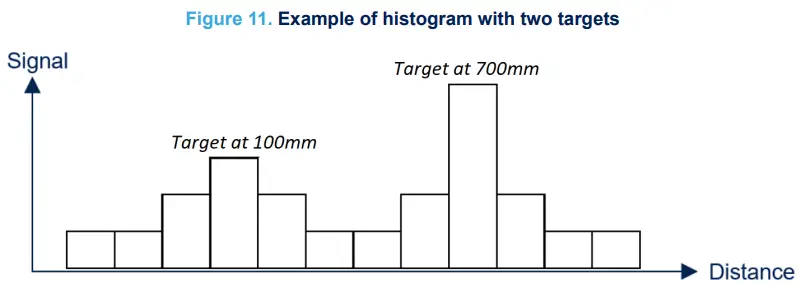
ပစ်မှတ်အမိန့်
VL53L5CX သည် ဇုန်အလိုက် ပစ်မှတ်များစွာကို တိုင်းတာနိုင်သည်။ ဟီစတိုဂရမ် လုပ်ဆောင်ခြင်းကြောင့်၊ အိမ်ရှင်သည် အစီရင်ခံထားသော ပစ်မှတ်များ၏ အစီအစဥ်ကို ရွေးချယ်နိုင်သည်။ ရွေးချယ်စရာနှစ်ခုရှိသည်။
- အနီးစပ်ဆုံး- အနီးစပ်ဆုံးပစ်မှတ်သည် ပထမဆုံးအစီရင်ခံချက်ဖြစ်သည်။
- အခိုင်မာဆုံး- အပြင်းထန်ဆုံးပစ်မှတ်သည် ပထမဆုံးအစီရင်ခံချက်ဖြစ်သည်။
လုပ်ဆောင်ချက် vl53l5cx_set_target_order() ကို အသုံးပြု၍ ပစ်မှတ်အမှာစာကို ပြောင်းလဲနိုင်သည်။ မူရင်းအမိန့်သည် အခိုင်မာဆုံးဖြစ်သည်။
ရည်းစားဟောင်းampအောက်ဖော်ပြပါပုံတွင် le သည် ပစ်မှတ်နှစ်ခု၏ ထောက်လှမ်းမှုကို ကိုယ်စားပြုသည်။ အနိမ့်ရောင်ပြန်ဟပ်မှု 100 မီလီမီတာတွင်တစ်ခုနှင့် 700 မီလီမီတာတွင် တစ်ခုသည် မြင့်မားသောအလင်းပြန်မှုရှိသည်။
ဇုန်အလိုက် ပစ်မှတ်များစွာ
VL53L5CX သည် ဇုန်တစ်ခုလျှင် ပစ်မှတ်လေးခုအထိ တိုင်းတာနိုင်သည်။ အသုံးပြုသူသည် အာရုံခံကိရိယာမှ ပြန်ပေးသည့် ပစ်မှတ်အရေအတွက်ကို စီစဉ်သတ်မှတ်နိုင်သည်။
မှတ်ချက် - ထောက်လှမ်းရမည့် ပစ်မှတ်နှစ်ခုကြား အနိမ့်ဆုံးအကွာအဝေးမှာ 600 mm ဖြစ်သည်။
ယာဉ်မောင်းမှရွေးချယ်မှုမဖြစ်နိုင်ပါ။ ၎င်းကို 'Platform.h' တွင် လုပ်ဆောင်ရမည်၊ file. မက်ခရို VL53L5CX_NB_ TARGET_PER_ZONE သည် 1 နှင့် 4 အကြား တန်ဖိုးတစ်ခုအဖြစ် သတ်မှတ်ရန် လိုအပ်သည်။ အပိုင်း 4.9 တွင်ဖော်ပြထားသော ပစ်မှတ်အမိန့်သည် ရှာဖွေတွေ့ရှိထားသော ပစ်မှတ်၏အစီအစဥ်ကို တိုက်ရိုက်အကျိုးသက်ရောက်သည်။ ပုံမှန်အားဖြင့်၊ အာရုံခံကိရိယာသည် ဇုန်တစ်ခုလျှင် အများဆုံးပစ်မှတ်တစ်ခုသာ ထုတ်ပေးသည်။
မှတ်ချက် - ဇုန်အလိုက် ပစ်မှတ်အရေအတွက် တိုးလာခြင်းသည် လိုအပ်သော RAM အရွယ်အစားကို တိုးစေသည်။
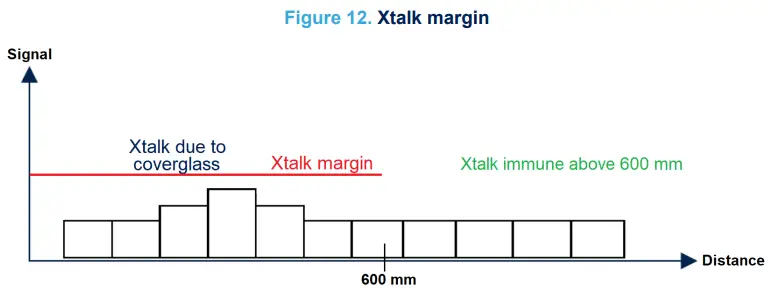
Xtalk အနားသတ်
Xtalk အနားသတ်သည် ပလပ်အင် Xtalk ကို အသုံးပြု၍သာ ရရှိနိုင်သော နောက်ထပ်အင်္ဂါရပ်တစ်ခုဖြစ်သည်။ .c နှင့် .f files 'vl53l5cx_plugin_xtalk' ကို အသုံးပြုရန် လိုအပ်သည်။
အာရုံခံကိရိယာ၏ထိပ်တွင် အဖုံးမှန်တစ်ခုရှိနေသောအခါ ထောက်လှမ်းမှုအဆင့်ကို ပြောင်းလဲရန် အနားသတ်ကို အသုံးပြုသည်။ crosstalk calibration data ကို သတ်မှတ်ပြီးနောက် အဖုံးမှန်ကို ဘယ်သောအခါမှ ရှာမတွေ့ကြောင်း သေချာစေရန် တံခါးခုံကို တိုးမြှင့်နိုင်သည်။ ဟောင်းအတွက်ampထို့ကြောင့်၊ အသုံးပြုသူသည် စက်တစ်ခုတည်းတွင် crosstalk ချိန်ညှိခြင်းကို လုပ်ဆောင်နိုင်ပြီး အခြားစက်ပစ္စည်းအားလုံးအတွက် တူညီသော ချိန်ညှိဒေတာကို ပြန်လည်အသုံးပြုနိုင်သည်။ Crosstalk တည့်မတ်မှုကို ချိန်ညှိရန် Xtalk အနားသတ်ကို အသုံးပြုနိုင်သည်။ အောက်ပါပုံသည် Xtalk အနားသတ်ကို ကိုယ်စားပြုသည်။
ထောက်လှမ်းခြင်း အဆင့်များ
ပုံမှန်သတ်မှတ်ထားသော စံနှုန်းများအောက်တွင် အရာဝတ္ထုတစ်ခုကို ရှာဖွေရန် အာရုံခံကိရိယာအား ပရိုဂရမ်ပြုလုပ်နိုင်သည်။ API တွင် မူရင်းအတိုင်းမပါဝင်သည့် ရွေးချယ်မှုတစ်ခုဖြစ်သည့် “ထောက်လှမ်းခြင်းအဆင့်များ” ပလပ်အင်ကို အသုံးပြု၍ ဤအင်္ဂါရပ်ကို ရရှိနိုင်သည်။ ဟိ files ဟုခေါ်သော 'vl53l5cx_plugin_detection_thresholds' ကို အသုံးပြုရန် လိုအပ်သည်။
အသုံးပြုသူမှသတ်မှတ်ထားသောအခြေအနေများပြည့်မီသောအခါတွင် A3 (INT) ကို ပင်အနှောက်အယှက်ဖြစ်စေရန်အတွက် အင်္ဂါရပ်ကို အသုံးပြုနိုင်သည်။ ဖြစ်နိုင်ချေရှိသော ပုံစံသုံးမျိုးရှိသည်။
- ကြည်လင်ပြတ်သားမှု 4×4- ဇုန်တစ်ခုလျှင် အတိုင်းအတာတစ်ခု (စုစုပေါင်း 16 အဆင့်သတ်မှတ်ချက်) ကိုအသုံးပြုသည်
- ကြည်လင်ပြတ်သားမှု 4×4- ဇုန်တစ်ခုလျှင် အဆင့်နှစ်ဆင့်ကို အသုံးပြုခြင်း (စုစုပေါင်း 32 အဆင့်များ)
- ကြည်လင်ပြတ်သားမှု 8×8- ဇုန်တစ်ခုလျှင် အတိုင်းအတာတစ်ခု (စုစုပေါင်း 64 အဆင့်သတ်မှတ်ချက်) ကိုအသုံးပြုသည်
မည်သည့်ပုံစံကိုအသုံးပြုသည်ဖြစ်စေ thresholds ဖန်တီးခြင်းလုပ်ငန်းစဉ်နှင့် RAM အရွယ်အစားသည် တူညီပါသည်။ အဆင့်သတ်မှတ်ပေါင်းစပ်မှုတစ်ခုစီအတွက်၊ နယ်ပယ်များစွာကို ဖြည့်ရန် လိုအပ်သည်- - ဇုန်အိုင်ဒီ- ရွေးချယ်ထားသောဇုန်၏ ID (အပိုင်း 2.2- ထိရောက်သော လမ်းညွှန်မှုကို ကိုးကားပါ)
- တိုင်းတာခြင်း- ဖမ်းရန် တိုင်းတာခြင်း (အကွာအဝေး၊ အချက်ပြမှု၊ SPAD အရေအတွက်၊ …)
- အမျိုးအစား- အတိုင်းအတာပြတင်းပေါက်များ (ပြတင်းပေါက်တွင်၊ ပြတင်းပေါက်အပြင်၊ နိမ့်သောအဆင့်အောက်၊ …)
- အဆင့်နိမ့်- အစပျိုးမှုအတွက် ကန့်သတ်ချက်နည်းသော အသုံးပြုသူ။ အသုံးပြုသူသည် ဖော်မတ်သတ်မှတ်ရန် မလိုအပ်ပါ၊ ၎င်းကို API မှ အလိုအလျောက် ကိုင်တွယ်ပါသည်။
- မြင့်မားသောအဆင့်- အစပျိုးမှုအတွက် မြင့်မားသောအဆင့်အသုံးပြုသူ။ အသုံးပြုသူသည် format ကိုသတ်မှတ်ရန်မလိုအပ်ပါ။ ၎င်းကို API မှ အလိုအလျောက် ကိုင်တွယ်ပါသည်။
- သင်္ချာလုပ်ဆောင်ချက်- ဇုန်တစ်ခုလျှင် 4×4 – 2 threshold ပေါင်းစပ်မှုအတွက်သာ အသုံးပြုသည်။ အသုံးပြုသူသည် ဇုန်တစ်ခုတွင် အဆင့်များစွာကို အသုံးပြု၍ ပေါင်းစပ်တစ်ခုကို သတ်မှတ်နိုင်သည်။
ရွေ့လျားမှုညွှန်ပြချက်
VL53L5CX အာရုံခံကိရိယာသည် မြင်ကွင်းတစ်ခုအတွင်း ရွေ့လျားမှုကို ထောက်လှမ်းနိုင်စေမည့် မြှုပ်သွင်းထားသော ဖမ်ဝဲအင်္ဂါရပ်တစ်ခု ပါရှိသည်။ ရွေ့လျားမှုညွှန်ကိန်းကို ဆက်တိုက်ဘောင်များကြားတွင် တွက်ချက်ထားသည်။ plugin'vl53l5cx_plugin_motion_indicator' ကို အသုံးပြု၍ ဤရွေးချယ်မှုကို ရနိုင်ပါသည်။
ရွေ့လျားမှုညွှန်ကိန်းကို vl53l5cx_motion_indicator_init() လုပ်ဆောင်ချက်ကို အသုံးပြု၍ အစပြုထားသည်။ အာရုံခံကြည်လင်ပြတ်သားမှုကို ပြောင်းလဲရန်၊ သီးခြားလုပ်ဆောင်ချက်ကို အသုံးပြု၍ ရွေ့လျားမှုညွှန်ပြချက် ကြည်လင်ပြတ်သားမှုကို အပ်ဒိတ်လုပ်ပါ- vl53l5cx_motion_indicator_set_resolution()။
အသုံးပြုသူသည် ရွေ့လျားမှုကို ထောက်လှမ်းရန်အတွက် အနိမ့်ဆုံးနှင့် အမြင့်ဆုံးအကွာအဝေးကိုလည်း ပြောင်းလဲနိုင်သည်။ အနိမ့်ဆုံးနှင့် အမြင့်ဆုံးအကွာအဝေးကြား ခြားနားချက်သည် 1500 မီလီမီတာထက် မပိုနိုင်ပါ။ ပုံမှန်အားဖြင့်၊ အကွာအဝေးများကို 400 မီလီမီတာနှင့် 1500 မီလီမီတာအကြား တန်ဖိုးများဖြင့် အစပြုထားသည်။
ရလဒ်များကို 'motion_indicator' အကွက်တွင် သိမ်းဆည်းထားသည်။ ဤအကွက်တွင်၊ အခင်းအကျင်း 'ရွေ့လျားမှု' သည် ဇုန်အလိုက် ရွေ့လျားမှုပြင်းထန်မှုပါရှိသော တန်ဖိုးတစ်ခုပေးသည်။ မြင့်မားသောတန်ဖိုးသည် ဖရိမ်များကြားတွင် ရွေ့လျားမှုမြင့်မားမှုကို ဖော်ပြသည်။ ပုံမှန်လှုပ်ရှားမှုတစ်ခုသည် 100 နှင့် 500 ကြားတန်ဖိုးကိုပေးသည်။ ဤအာရုံခံနိုင်စွမ်းသည် ပေါင်းစပ်ချိန်၊ ပစ်မှတ်အကွာအဝေးနှင့် ပစ်မှတ်ရောင်ပြန်ဟပ်မှုတို့အပေါ် မူတည်သည်။
ပါဝါနည်းသောအက်ပ်လီကေးရှင်းများအတွက် စံပြပေါင်းစပ်မှုမှာ အလိုအလျောက်အကွာအဝေးမုဒ်ဖြင့် ရွေ့လျားမှုညွှန်ပြချက်အသုံးပြုမှုနှင့် လှုပ်ရှားမှုတွင် ပရိုဂရမ်ပြုလုပ်ထားသည့် ထောက်လှမ်းမှုအဆင့်သတ်မှတ်ချက်များကို အသုံးပြုခြင်းဖြစ်သည်။ ၎င်းသည် ပါဝါသုံးစွဲမှု အနည်းဆုံးဖြင့် FoV တွင် ရွေ့လျားမှုကွဲပြားမှုများကို ထောက်လှမ်းနိုင်စေပါသည်။
အချိန်အခါအလိုက် အပူချိန်လျော်ကြေးပေးခြင်း
အကွာအဝေး စွမ်းဆောင်ရည်သည် အပူချိန် ပြောင်းလဲမှုများကြောင့် ထိခိုက်သည်။ VL53L5CX အာရုံခံကိရိယာသည် ထုတ်လွှင့်မှုစတင်သောအခါတွင် တစ်ကြိမ် ချိန်ညှိထားသည့် အပူချိန်လျော်ကြေးငွေကို ထည့်သွင်းသည်။ သို့သော် အပူချိန် တိုးလာပါက လျော်ကြေးငွေသည် အပူချိန်အသစ်နှင့် လိုက်လျောညီထွေရှိမည်မဟုတ်ပါ။ ဤပြဿနာကိုရှောင်ရှားရန်၊ သုံးစွဲသူသည် အော်တို VHV ကို အသုံးပြု၍ အချိန်အလိုက် အပူချိန်လျော်ကြေးငွေကို လုပ်ဆောင်နိုင်သည်။ အချိန်အပိုင်းအခြားအလိုက် အပူချိန်ချိန်ညှိခြင်းသည် လုပ်ဆောင်ရန် မီလီစက္ကန့်အနည်းငယ်ကြာသည်။ အသုံးပြုသူသည် ကာလကို သတ်မှတ်နိုင်သည်။
ဤအင်္ဂါရပ်ကိုအသုံးပြုရန်၊ ဝယ်ယူသူသည်-
• လုပ်ဆောင်ချက် vl53l5cx_set_VHV_repeat_count() ကိုခေါ်ဆိုပါ။
• ထို့နောက်၊ အကြောင်းပြချက်အဖြစ် သတ်မှတ်ချိန်ညှိမှုအသစ်တိုင်းကြားတွင် ဖရိမ်အရေအတွက်ကို ပေးပါ။
အငြင်းအခုံဖြစ်လျှင် လျော်ကြေးငွေကို ပိတ်ထားသည်။
အဆင့်အလိုက် ရလဒ်များ
ရရှိနိုင်သောဒေတာ
ကျယ်ပြန့်သော ပစ်မှတ်နှင့် ပတ်၀န်းကျင်ဒေတာစာရင်းကို အပိုင်းလိုက်လုပ်ဆောင်မှုများအတွင်း ထုတ်ပေးနိုင်သည်။ အောက်ပါဇယားသည် အသုံးပြုသူအတွက် ရရှိနိုင်သော ကန့်သတ်ချက်များကို ဖော်ပြသည်။
စားပွဲ 3. VL53L5CX အာရုံခံကိရိယာကို အသုံးပြု၍ ရရှိနိုင်သော အထွက်
| ဒြပ် | Nb bytes (RAM) | ယူနစ် | ဖော်ပြချက် |
| SPAD အလိုက် ပတ်ဝန်းကျင် | 256 | Kcps/SPAD | ဆူညံသံကြောင့် ပတ်ဝန်းကျင် အချက်ပြမှုနှုန်းကို တိုင်းတာရန် SPAD အခင်းအကျင်းတွင် လုပ်ဆောင်သည့် တက်ကြွသော ဖိုတွန် ထုတ်လွှတ်မှု မရှိသော ဝန်းကျင်နှုန်း တိုင်းတာခြင်း။ |
| ပစ်မှတ်အရေအတွက်ကို တွေ့ရှိခဲ့သည်။ | 64 | တစ်ခုမှ | လက်ရှိဇုန်တွင် တွေ့ရှိထားသော ပစ်မှတ်အရေအတွက်။ အတိုင်းအတာတစ်ခု၏တရားဝင်မှုကိုသိရန် ဤတန်ဖိုးသည် ပထမဆုံးစစ်ဆေးသင့်သည်။ |
| SPAD အရေအတွက်ကို ဖွင့်ထားသည်။ | 256 | တစ်ခုမှ | လက်ရှိတိုင်းတာမှုအတွက် ဖွင့်ထားသည့် SPAD အရေအတွက်။ အကွာအဝေး သို့မဟုတ် နိမ့်သောအလင်းပြန်ပစ်မှတ်သည် SPAD များကို ပိုမိုအသက်ဝင်လာစေသည်။ |
| SPAD အတွက် အချက်ပြမှု | 256 x nb ပစ်မှတ်များကို အစီအစဉ်ချထားသည်။ | Kcps/SPAD | VCSEL သွေးခုန်နှုန်းအတွင်း တိုင်းတာသော ဖိုတွန်ပမာဏ။ |
| အပိုင်းအခြား အမှတ်အသား | 128 x nb ပစ်မှတ်များကို အစီအစဉ်ချထားသည်။ | မီလီမီတာ | ပစ်မှတ်အကွာအဝေးရှိ ဆူညံသံများအတွက် Sigma ခန့်မှန်းချက်။ |
| အကွာအဝေး | 128 x nb ပစ်မှတ်များကို အစီအစဉ်ချထားသည်။ | မီလီမီတာ | ပစ်မှတ်အကွာအဝေး |
| ပစ်မှတ်အနေအထား | 64 x nb ပစ်မှတ်များကို အစီအစဉ်ချထားသည်။ | တစ်ခုမှ | အတိုင်းအတာများ တရားဝင်မှု။ ကြည့်ပါ။ အပိုင်း 5.5- ရလဒ်များ အနက် ပိုမိုသိရှိလိုပါက။ |
| ရောင်ပြန်ဟပ်မှု | 64 x နံပါတ်ပစ်မှတ်များကို အစီအစဉ်ချထားသည်။ | ရာခိုင်နှုန်း | ခန့်မှန်းချေ ပစ်မှတ်ထင်ဟပ်မှု ရာခိုင်နှုန်း |
| ရွေ့လျားမှုညွှန်ပြချက် | 140 | တစ်ခုမှ | ရွေ့လျားမှုညွှန်ပြချက်ရလဒ်များပါရှိသောဖွဲ့စည်းပုံ။ အကွက် 'ရွေ့လျားမှု' တွင် ရွေ့လျားမှုပြင်းထန်မှု ပါရှိသည်။ |
မှတ်ချက် - အသုံးပြုသူသည် ဇုန်တစ်ခုလျှင် ပစ်မှတ်တစ်ခုထက်ပို၍ ပရိုဂရမ်ပြုလုပ်ထားပါက ဒေတာအသုံးပြုခွင့်သည် အစိတ်အပိုင်းများစွာ (signal per spad၊ sigma၊ …) ကွဲပြားသည် (အပိုင်း 4.10 ကိုကြည့်ပါ- ဇုန်တစ်ခုလျှင် ပစ်မှတ်များစွာ)။ ex ကိုကြည့်ပါ။ampပိုမိုသိရှိလိုပါကများအတွက် le ကုဒ်များ။
အထွက်ရွေးချယ်မှုကို စိတ်ကြိုက်လုပ်ပါ။
ပုံမှန်အားဖြင့်၊ VL53L5CX အထွက်များအားလုံးကို ဖွင့်ထားသည်။ လိုအပ်ပါက အသုံးပြုသူသည် အာရုံခံအထွက်အချို့ကို ပိတ်နိုင်သည်။
အတိုင်းအတာများကို ပိတ်ခြင်းအား ယာဉ်မောင်းတွင် မရရှိနိုင်ပါ။ ၎င်းကို 'ပလပ်ဖောင်း.h' တွင် လုပ်ဆောင်ရမည် file. အထွက်များကို ပိတ်ရန် အသုံးပြုသူသည် အောက်ပါ မက်ခရိုများကို ကြေညာနိုင်သည်-
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#Define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#Define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#Define VL53L5CX_DISABLE_MOTION_INDICATOR
ထို့ကြောင့်၊ အကွက်များကို ရလဒ်ဖွဲ့စည်းပုံတွင် မကြေငြာဘဲ၊ ဒေတာကို လက်ခံသူထံ လွှဲပြောင်းပေးမည်မဟုတ်ပါ။ RAM အရွယ်အစားနှင့် I²C အရွယ်အစားကို လျှော့ချထားသည်။
ဒေတာညီညွတ်မှုရှိစေရန်၊ ST သည် 'ပစ်မှတ်အရေအတွက်' နှင့် 'ပစ်မှတ်အခြေအနေ' ကို ဖွင့်ထားရန် အမြဲအကြံပြုထားသည်။ ၎င်းသည် ပစ်မှတ်အခြေအနေပေါ်မူတည်၍ တိုင်းတာမှုများကို စစ်ထုတ်သည် (အပိုင်း 5.5- ရလဒ်များအနက်ကို ကိုးကားပါ)။
အကွာအဝေးရလဒ်များရယူခြင်း။
အပိုင်းအခြားသတ်မှတ်ချိန်အတွင်း၊ အပိုင်းအခြားဒေတာအသစ်များ ရနိုင်မလား။
- မဲစာရင်းမုဒ်- လုပ်ဆောင်ချက် vl53l5cx_check_data_ready() ကို စဉ်ဆက်မပြတ် အသုံးပြုသည်။ ၎င်းသည် အာရုံခံကိရိယာမှ ပြန်ပေးသော ထုတ်လွှင့်မှုအရေအတွက်အသစ်ကို ထောက်လှမ်းသည်။
- အနှောက်အယှက်မုဒ်- ပင် A3 (GPIO1) ပေါ်ရှိ နှောင့်ယှက်မှုကို စောင့်နေသည်။ ~100 μs အကြာတွင် ကြားဖြတ်သည် အလိုအလျောက်ရှင်းပါသည်။
ဒေတာအသစ်အဆင်သင့်ဖြစ်သောအခါ၊ လုပ်ဆောင်ချက် vl53l5cx_get_ranging_data() ကို အသုံးပြု၍ ရလဒ်များကို ဖတ်နိုင်သည်။ ၎င်းသည် ရွေးချယ်ထားသော အထွက်အားလုံးကို ပါဝင်သော မွမ်းမံထားသော ဖွဲ့စည်းပုံကို ပြန်ပေးသည်။ စက်ပစ္စည်းသည် ချိန်ကိုက်ညီနေသောကြောင့်၊ အပိုင်းအခြားဆက်ရှင်ကို ဆက်လက်လုပ်ဆောင်ရန် ရှင်းလင်းရန် အနှောင့်အယှက်မရှိပါ။
ဤအင်္ဂါရပ်သည် စဉ်ဆက်မပြတ်နှင့် အလိုအလျောက် အတိုင်းအတာမုဒ်နှစ်ခုလုံးအတွက် ရနိုင်ပါသည်။
ကုန်ကြမ်း Firmware ဖော်မတ်ကို အသုံးပြုခြင်း။
I²C မှတဆင့် အပိုင်းအခြားဒေတာကို လွှဲပြောင်းပြီးနောက်၊ firmware ဖော်မတ်နှင့် host ဖော်မတ်အကြား ပြောင်းလဲမှုတစ်ခု ရှိလာပါသည်။ အာရုံခံကိရိယာ၏ ပုံသေအထွက်တစ်ခုအဖြစ် မီလီမီတာအကွာအဝေးရှိရန် ဤလုပ်ဆောင်ချက်ကို ပုံမှန်အားဖြင့် လုပ်ဆောင်သည်။ အသုံးပြုသူသည် ဖန်းဝဲဖော်မတ်ကို အသုံးပြုလိုပါက၊ အောက်ပါ မက်ခရိုကို ပလပ်ဖောင်းတွင် သတ်မှတ်ရပါမည်။ file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
ရလဒ်များအနက်
VL53L5CX မှ ပြန်ပေးသည့်ဒေတာကို ပစ်မှတ်အခြေအနေကို ထည့်သွင်းစဉ်းစားရန် စစ်ထုတ်နိုင်ပါသည်။ အခြေအနေသည် တိုင်းတာခြင်းတရားဝင်မှုကို ညွှန်ပြသည်။ အခြေအနေစာရင်းအပြည့်အစုံကို အောက်ပါဇယားတွင် ဖော်ပြထားသည်။
စားပွဲ 4. ရရှိနိုင်သောပစ်မှတ်အခြေအနေစာရင်း
| ပစ်မှတ်အနေအထား | ဖော်ပြချက် |
| 0 | အဆင့်သတ်မှတ်ချက်ဒေတာကို အပ်ဒိတ်မလုပ်ပါ။ |
| 1 | SPAD ခင်းကျင်းတွင် အချက်ပြနှုန်း အလွန်နည်းသည်။ |
| 2 | ပစ်မှတ်အဆင့် |
| 3 | Sigma ခန့်မှန်းချက် အလွန်မြင့်မားသည်။ |
| 4 | ပစ်မှတ် ညီညွတ်မှု မအောင်မြင်ပါ။ |
| 5 | အတိုင်းအတာ မှန်ကန်သည်။ |
| 6 | ပတ်၀န်းကျင်ကို မလုပ်ဆောင်ပါ (ပုံမှန်အားဖြင့် ပထမအပိုင်း) |
| 7 | အဆင့်သတ်မှတ်မှု ညီညွတ်မှု မအောင်မြင်ပါ။ |
| 8 | လက်ရှိပစ်မှတ်အတွက် အချက်ပြနှုန်း အလွန်နည်းသည်။ |
| 9 | ကြီးမားသော သွေးခုန်နှုန်းဖြင့် အကျုံးဝင်သည့် အပိုင်းအခြား (ပေါင်းစပ်ပစ်မှတ်တစ်ခုကြောင့် ဖြစ်နိုင်သည်) |
| 10 | အပိုင်းအခြား မှန်ကန်သော်လည်း ယခင်အကွာအဝေးတွင် ပစ်မှတ်မတွေ့ပါ။ |
| 11 | တိုင်းတာမှု ညီညွတ်မှု မအောင်မြင်ပါ။ |
| 12 | ချွန်စက်ကြောင့် ပစ်မှတ်သည် မှုန်ဝါးသွားသည်။ |
| 13 | ပစ်မှတ်ကို တွေ့ရှိသော်လည်း ဒေတာမကိုက်ညီပါ။ အလယ်တန်းပစ်မှတ်များအတွက် မကြာခဏဖြစ်တတ်သည်။ |
| 255 | မည်သည့်ပစ်မှတ်ကိုမျှ မတွေ့ပါ (ပစ်မှတ်အရေအတွက်ကို တွေ့ရှိပါက ဖွင့်ထားမှသာ) |
တသမတ်တည်း ဒေတာရှိရန်၊ အသုံးပြုသူသည် မမှန်ကန်သော ပစ်မှတ်အခြေအနေကို စစ်ထုတ်ရန် လိုအပ်သည်။ ယုံကြည်မှုအဆင့်သတ်မှတ်ချက်တစ်ခုပေးရန်၊ အဆင့် 5 ပါသည့်ပစ်မှတ်ကို 100% မှန်ကန်သည်ဟု ယူဆပါသည်။ 6 သို့မဟုတ် 9 ၏ အဆင့်အတန်းကို ယုံကြည်မှုတန်ဖိုး 50% ဖြင့် ယူဆနိုင်သည်။ အခြားအခြေအနေအားလုံးသည် ယုံကြည်မှု 50% အောက်တွင်ရှိသည်။
ယာဉ်မောင်းအမှားများ
VL53L5CX အာရုံခံကိရိယာကို အသုံးပြု၍ အမှားအယွင်းတစ်ခု ဖြစ်ပေါ်သောအခါ၊ ယာဉ်မောင်းသည် တိကျသောအမှားတစ်ခုကို ပြန်ပေးသည်။ အောက်ပါဇယားသည် ဖြစ်နိုင်ချေရှိသော အမှားများကို စာရင်းပြုစုထားသည်။
စားပွဲ 5. Driver ကို အသုံးပြု၍ ရရှိနိုင်သော အမှားများစာရင်း
| ပစ်မှတ်အနေအထား | ဖော်ပြချက် |
| 0 | အမှားအယွင်းမရှိပါ။ |
|
127 |
အသုံးပြုသူသည် မှားယွင်းသော ဆက်တင်တစ်ခုကို ပရိုဂရမ်ပြုလုပ်ခဲ့သည်။
(အမည်မသိ ကြည်လင်ပြတ်သားမှု၊ အပိုင်းအခြား ကြိမ်နှုန်း မြင့်မားလွန်းခြင်း၊ ...) |
| 255 | အဓိက အမှား။ များသောအားဖြင့် I²C အမှားကြောင့် အချိန်ကုန်သွားသော အမှားဖြစ်သည်။ |
| အခြား | အထက်တွင်ဖော်ပြထားသော အမှားများစွာကို ပေါင်းစပ်ထားသည်။ |
မှတ်ချက် - လက်ခံသူသည် ပလပ်ဖောင်းကို အသုံးပြုခြင်းဖြင့် ပိုမိုအမှားအယွင်းကုဒ်များကို အကောင်အထည်ဖော်နိုင်သည်။ files.
ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
စားပွဲ 6. စာရွက်စာတမ်း ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
| ရက်စွဲ | ဗားရှင်း | အပြောင်းအလဲများ |
| ၁၂-ဇွန်-၂၀၂၄ | 1 | ကနဦး ထုတ်ဝေမှု |
| 30-Aug-2021 | 2 | ထပ်ပြောပါသည်။ အပိုင်း 5.4- ကုန်ကြမ်း Firmware ဖော်မတ်ကို အသုံးပြုခြင်း။
ပစ်မှတ်အသစ် 13 လက်မ ထပ်ထည့်ထားသည်။ ဇယား 4. ရရှိနိုင်သောပစ်မှတ်အခြေအနေစာရင်း |
| ၁၅-စက်တင်ဘာ-၂၁ | 3 | ပစ်မှတ်များကြား အနိမ့်ဆုံးအကွာအဝေးအကြောင်း မှတ်ချက်ထည့်ထားသည်။ အပိုင်း 4.10- ဇုန်တစ်ခုလျှင် ပစ်မှတ်များစွာ |
| 10-Aug-2023 | 4 | ပြင်ဆင်ထားသည်။ ပုံ ၃ampပစ်မှတ်နှစ်ခုပါသော ဟိုစတိုဂရမ်၏ le |
| ၂၇-ဖေဖော်ဝါရီ-၂၀၁၈ | 5 | ထည့်ထားသော VHV (အလွန်မြင့်မားသော voltagင) ရန် အပိုင်း 1- အတိုကောက်များနှင့် အတိုကောက်များ. ထပ်ပြောပါသည်။ အပိုင်း 4.14- အချိန်အခါအလိုက် အပူချိန် လျော်ကြေးငွေ |
အရေးကြီးသတိပေးချက် - ဂရုတစိုက်ဖတ်ပါ။
STMicroelectronics NV နှင့် ၎င်း၏လုပ်ငန်းခွဲများ (“ST”) သည် ST ထုတ်ကုန်များနှင့်/သို့မဟုတ် ဤစာရွက်စာတမ်းအား အသိပေးခြင်းမရှိဘဲ အပြောင်းအလဲများ၊ ပြုပြင်မှုများ၊ မြှင့်တင်မှုများ၊ ပြုပြင်မွမ်းမံမှုများနှင့် တိုးတက်မှုများကို အချိန်မရွေးပြုလုပ်ရန် လက်ဝယ်ရှိသည်။ အမှာစာမတင်မီ ဝယ်ယူသူများသည် ST ထုတ်ကုန်များဆိုင်ရာ နောက်ဆုံးရသက်ဆိုင်ရာအချက်အလက်များကို ရယူသင့်ပါသည်။ ST ထုတ်ကုန်များကို အမှာစာလက်ခံသည့်အချိန်တွင် ST ၏ရောင်းချမှုစည်းမျဉ်းစည်းကမ်းများနှင့်အညီ ရောင်းချပါသည်။
ဝယ်ယူသူများသည် ST ထုတ်ကုန်များ၏ ရွေးချယ်မှု၊ ရွေးချယ်မှုနှင့် အသုံးပြုမှုအတွက် တစ်ခုတည်းတွင် တာဝန်ရှိပြီး ST သည် လျှောက်လွှာအကူအညီ သို့မဟုတ် ဝယ်ယူသူများ၏ ထုတ်ကုန်ဒီဇိုင်းအတွက် တာဝန်မရှိဟု ယူဆပါသည်။
ဤနေရာတွင် ST မှ ပေးအပ်သည့် မည်သည့်ဉာဏပစ္စည်းမူပိုင်ခွင့်ကိုမဆို လိုင်စင်၊ ဖော်ပြခြင်း သို့မဟုတ် အဓိပ္ပာယ်ဖွင့်ဆိုထားခြင်းမရှိပါ။
ဤနေရာတွင်ဖော်ပြထားသော အချက်အလက်များနှင့် ကွဲပြားသော ပြဋ္ဌာန်းချက်များရှိသော ST ထုတ်ကုန်များကို ပြန်လည်ရောင်းချခြင်းသည် ထိုထုတ်ကုန်အတွက် ST မှပေးသော အာမခံတစ်စုံတစ်ရာကို ပျက်ပြယ်စေမည်ဖြစ်သည်။
ST နှင့် ST လိုဂိုများသည် ST ၏ကုန်အမှတ်တံဆိပ်များဖြစ်သည်။ ST အမှတ်တံဆိပ်များအကြောင်း နောက်ထပ်အချက်အလက်များအတွက် ကိုးကားပါ။ www.st.com/trademarks. အခြားထုတ်ကုန် သို့မဟုတ် ဝန်ဆောင်မှုအမည်များအားလုံးသည် ၎င်းတို့၏ သက်ဆိုင်ရာပိုင်ရှင်များ၏ ပိုင်ဆိုင်မှုဖြစ်သည်။
ဤစာရွက်စာတမ်းရှိ အချက်အလက်ကို အစားထိုးပြီး ဤစာရွက်စာတမ်း၏ ယခင်ဗားရှင်းတစ်ခုခုတွင် ယခင်က ပေးခဲ့သည့် အချက်အလက်များကို အစားထိုးသည်။
© 2024 STMicroelectronics - အခွင့်အရေးအားလုံးကို လက်ဝယ်ရှိသည်။

စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
STMicroelectronics VL53L5CX Multizone Time of Flight Ranging Sensor [pdf] အသုံးပြုသူလက်စွဲ VL53L5CX Multizone Time of Flight Ranging Sensor၊ VL53L5CX၊ Multizone Time of Flight Ranging Sensor၊ Time of Flight Ranging Sensor၊ Flight Ranging Sensor၊ Ranging Sensor၊ Sensor |



