STMicroelectronics UM2193 MotionAR လုပ်ဆောင်ချက် အသိအမှတ်ပြု စာကြည့်တိုက်
နိဒါန်း
Motion AR သည် X-CUBE-MEMS1 ဆော့ဖ်ဝဲလ်၏ အလယ်တန်းဆော့ဖ်ဝဲတစ်ခုဖြစ်ပြီး STM32 ပေါ်တွင် လုပ်ဆောင်သည်။ ၎င်းသည် အသုံးပြုသူလုပ်ဆောင်သည့် လုပ်ဆောင်ချက်အမျိုးအစားအပေါ် အချိန်နှင့်တစ်ပြေးညီ အချက်အလက်ကို ပေးဆောင်သည်။ ၎င်းသည် အောက်ဖော်ပြပါ လှုပ်ရှားမှုများကို ခွဲခြားနိုင်သည်- စာရေးခြင်း၊ လမ်းလျှောက်ခြင်း၊ အမြန်လမ်းလျှောက်ခြင်း၊ ရွရွပြေးခြင်း၊ စက်ဘီးစီးခြင်း၊ ကားမောင်းခြင်း။
ဤစာကြည့်တိုက်သည် ST MEMS နှင့်သာ အလုပ်လုပ်ရန် ရည်ရွယ်ပါသည်။
အယ်လဂိုရီသမ်ကို တည်ငြိမ်စာကြည့်တိုက်ဖော်မတ်ဖြင့် ပံ့ပိုးထားပြီး ARM® Cortex®-M32၊ ARM® Cortex®-M3၊ ARM® Cortex®-M33 သို့မဟုတ် ARM® Cortex®-M4 ဗိသုကာကို အခြေခံ၍ STM7 မိုက်ခရိုကွန်ထရိုလာများတွင် အသုံးပြုရန် ဒီဇိုင်းထုတ်ထားသည်။
၎င်းကို မတူညီသော STM32 မိုက်ခရိုကွန်ထရိုလာများတွင် သယ်ဆောင်ရလွယ်ကူစေသည့် STM32Cube ဆော့ဖ်ဝဲနည်းပညာ၏ထိပ်တွင် တည်ဆောက်ထားသည်။
software သည် s နှင့်လာပါသည်။ampNUCLEO-F01RE၊ NUCLEO-L3RE သို့မဟုတ် NUCLEO-U4ZI-Q ဖွံ့ဖြိုးတိုးတက်ရေးဘုတ်အဖွဲ့တွင် X-NUCLEO-IKS1A401 သို့မဟုတ် X-NUCLEO-IKS152A575 တိုးချဲ့ဘုတ်ပေါ်တွင် လုပ်ဆောင်နေသည့် အကောင်အထည်ဖော်မှု။
အတိုကောက်များနှင့် အတိုကောက်များ
ဇယား ၁။ အတိုကောက်များစာရင်း
| အတိုကောက် | ဖော်ပြချက် |
| API | အက်ပ်ပရိုဂရမ်းမင်း အင်တာဖေ့စ် |
| BSP | ဘုတ်အဖွဲ့ထောက်ခံမှုအထုပ် |
| GUI | ဂရပ်ဖစ်အသုံးပြုသူ အင်တာဖေ့စ် |
| HAL | Hardware abstraction အလွှာ |
| IDE | ပေါင်းစပ်ဖွံ့ဖြိုးတိုးတက်ရေးပတ်ဝန်းကျင် |
X-CUBE-MEMS1 ဆော့ဖ်ဝဲတိုးချဲ့မှုတွင် Motion AR အလယ်တန်းဆော့ဖ်ဝဲစာကြည့်တိုက်
AR ကိုရွှေ့ပါ။view
Motion AR စာကြည့်တိုက်သည် X-CUBE-MEMS1 ဆော့ဖ်ဝဲလ်၏ လုပ်ဆောင်နိုင်စွမ်းကို ချဲ့ထွင်ပေးသည်။
စာကြည့်တိုက်သည် accelerometer မှဒေတာကိုရယူပြီး အသုံးပြုသူလုပ်ဆောင်သည့် လုပ်ဆောင်ချက်အမျိုးအစားနှင့်ပတ်သက်သည့် အချက်အလက်များကို ပေးဆောင်သည်။
စာကြည့်တိုက်သည် ST MEMS အတွက်သာ ဒီဇိုင်းထုတ်ထားသည်။ အခြား MEMS အာရုံခံကိရိယာများကို အသုံးပြုသည့်အခါ လုပ်ဆောင်နိုင်စွမ်းနှင့် စွမ်းဆောင်ရည်ကို ခွဲခြမ်းစိတ်ဖြာခြင်းမပြုဘဲ စာရွက်စာတမ်းတွင်ဖော်ပြထားသည့်အရာများနှင့် သိသိသာသာကွဲပြားနိုင်သည်။
Sampအကောင်အထည်ဖော်မှုကို NUCLEO-F01RE၊ NUCLEO-L3RE သို့မဟုတ် NUCLEO-U4ZI-Q ဖွံ့ဖြိုးတိုးတက်ရေးဘုတ်တွင်တပ်ဆင်ထားသည့် X-NUCLEO-IKS1A401 သို့မဟုတ် X-NUCLEO-IKS152A575 တိုးချဲ့ဘုတ်များတွင် ရနိုင်ပါသည်။
Motion AR စာကြည့်တိုက်
MotionAR_Package.chm ပြုစုထားသော HTML တွင် MotionAR_Package.chm ၏ လုပ်ဆောင်ချက်များနှင့် ကန့်သတ်ချက်များ အပြည့်အ၀ဖော်ပြသည့် နည်းပညာဆိုင်ရာ အချက်အလက်ကို တွေ့ရှိနိုင်သည်။ file Documentation folder တွင် တည်ရှိသည်။
Motion AR စာကြည့်တိုက်ဖော်ပြချက်
- Motion AR လုပ်ဆောင်ချက် မှတ်သားမှု စာကြည့်တိုက်သည် accelerometer မှရရှိသော အချက်အလက်များကို စီမံခန့်ခွဲပါသည်။ ၎င်းတွင်အင်္ဂါရပ်များ:
- အောက်ဖော်ပြပါ လှုပ်ရှားမှုများကို ခွဲခြားရန် ဖြစ်နိုင်ချေ- စာရေးခြင်း၊ လမ်းလျှောက်ခြင်း၊ အမြန်လမ်းလျှောက်ခြင်း၊ ရွရွပြေးခြင်း၊ စက်ဘီးစီးခြင်း၊ ကားမောင်းခြင်း
- accelerometer ဒေတာပေါ်တွင်သာအခြေခံပြီးအသိအမှတ်ပြုမှု
- လိုအပ်သော accelerometer ဒေတာ sampလင်ကြိမ်နှုန်း- 16 Hz
- အရင်းအမြစ်လိုအပ်ချက်များ
- Cortex-M3- ကုဒ်၏ 8.5 kB နှင့် ဒေတာမှတ်ဉာဏ် 1.4 kB
- Cortex-M33- ကုဒ်၏ 7.8 kB နှင့် ဒေတာမှတ်ဉာဏ် 1.4 kB
- Cortex-M4- ကုဒ်၏ 7.9 kB နှင့် ဒေတာမှတ်ဉာဏ် 1.4 kB
- Cortex-M7- ကုဒ်၏ 8.1 kB နှင့် ဒေတာမှတ်ဉာဏ် 1.4 kB
- ARM Cortex-M3၊ Cortex-M33၊ Cortex-M4 နှင့် Cortex-M7 ဗိသုကာများ အတွက် ရနိုင်သည်
MotionAR API များ
MotionAR API များသည်-
- uint8_t MotionAR_GetLibVersion(char *ဗားရှင်း)
- စာကြည့်တိုက်ဗားရှင်းကို ထုတ်ယူသည်။
- *ဗားရှင်းသည် စာလုံး 35 လုံးပါသော array တစ်ခုဆီသို့ ညွှန်ပြချက်တစ်ခုဖြစ်သည်။
- ဗားရှင်းစာကြောင်းရှိ စာလုံးအရေအတွက်ကို ပြန်ပေးသည်။
- MotionAR_Initialize(ပျက်ပြယ်)
- MotionAR စာကြည့်တိုက်ကို အစပြုခြင်းနှင့် အတွင်းပိုင်းယန္တရား၏ တည်ဆောက်မှုကို လုပ်ဆောင်သည်။
- STM32 microcontroller ရှိ CRC module (RCC peripheral clock enable register) ရှိရမည်၊
စာကြည့်တိုက်ကို အသုံးမပြုမီ ဖွင့်ထားသည်။
မှတ်ချက် - accelerometer calibration library ကို အသုံးမပြုမီ ဤလုပ်ဆောင်ချက်ကို ခေါ်ရပါမည်။
- MotionAR_Reset(ပျက်ပြယ်)
- လုပ်ဆောင်ချက် အသိအမှတ်ပြုခြင်း အယ်လဂိုရီသမ်ကို ပြန်လည်သတ်မှတ်သည်။
- MotionAR_Update(MAR_input_t *data_in၊ MAR_output_t *data_out၊ int64_t ပျက်ပြယ်သည်
အကြိမ်ဆုံးamp)- လုပ်ဆောင်ချက် အသိအမှတ်ပြုမှု အယ်လဂိုရီသမ်ကို လုပ်ဆောင်သည်။
- *data_in ပါရာမီတာသည် ထည့်သွင်းဒေတာပါသည့် ဖွဲ့စည်းပုံသို့ ညွှန်ပြချက်တစ်ခုဖြစ်သည်။
- ဖွဲ့စည်းပုံအမျိုးအစား MAR_input_t အတွက် ဘောင်များသည်-
- acc_x သည် g in X ဝင်ရိုးရှိ accelerometer အာရုံခံကိရိယာတန်ဖိုးဖြစ်သည်။
- acc_y သည် g in Y ဝင်ရိုးရှိ အရှိန်မြှင့်မီတာ အာရုံခံကိရိယာတန်ဖိုးဖြစ်သည်။
- acc_z သည် g in Z ဝင်ရိုးရှိ accelerometer အာရုံခံကိရိယာတန်ဖိုးဖြစ်သည်။
- *data_out ပါရာမီတာသည် အောက်ပါအရာများနှင့်အတူ ထည့်သွင်းရန် ညွှန်ပြချက်တစ်ခုဖြစ်သည်။
- MAR_NOACTIVITY = 0
- MAR_STATIONARY = ၁
- MAR_WALKING = ၂
- MAR_FASTWALKING = ၃
- MAR_JOGGING = ၄
- MAR_BKING = ၅
- MAR_DRIVING = ၆
- အကြိမ်ဆုံးamp အမှန်တကယ် s အတွက် နှိုင်းရချိန်ဖြစ်သည်။ample in ms
- MotionAR_ ဦးတည်ချက်_ Acc(const char *acc_ orientation) ကို သတ်မှတ်ပါ
- accelerometer data orientation ကို သတ်မှတ်သည်။
- Motion AR_ စတင်လုပ်ဆောင်သည့် လုပ်ဆောင်ချက်ခေါ်ဆိုမှုပြီးနောက် ချက်ချင်းဖွဲ့စည်းမှုပုံစံကို လုပ်ဆောင်ပါသည်။
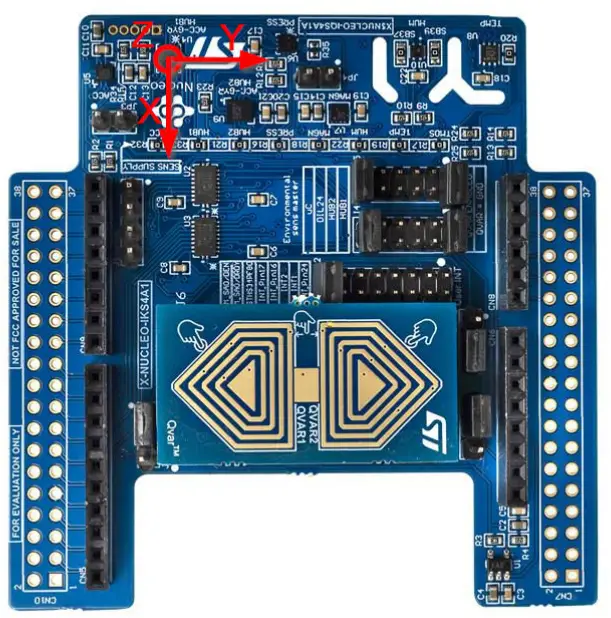
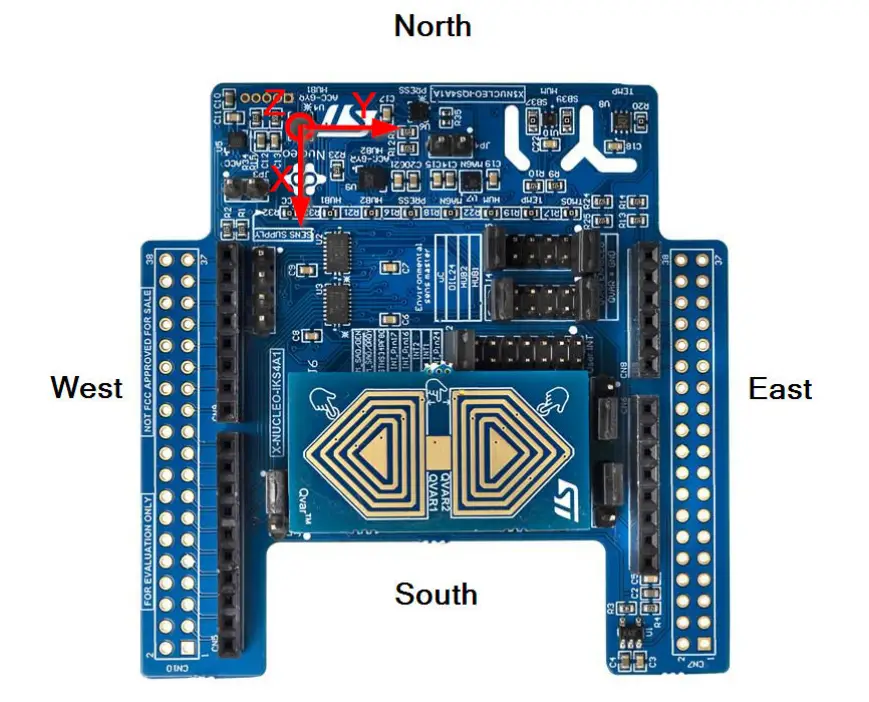
- *acc_ orientation parameter သည် accelerometer data output အတွက် အသုံးပြုသော accelerometer data output အတွက် အသုံးပြုသည့် ရည်ညွှန်းဘောင်၏ အပြုသဘောဆောင်သော လမ်းကြောင်းတစ်ခုစီ၏ ဦးတည်ချက်ကို ညွှန်ပြသည့် စာလုံးသုံးလုံး၏ string တစ်ခုဆီသို့ ညွှန်ပြသည့် ညွှန်ပြချက်တစ်ခုဖြစ်သည်။ မှန်ကန်သောတန်ဖိုးများမှာ- n (မြောက်) သို့မဟုတ် s (တောင်)၊ w (အနောက်) သို့မဟုတ် e (အရှေ့ဘက်)၊ u (အပေါ်) သို့မဟုတ် d (အောက်)
- အောက်တွင်ဖော်ပြထားသည့်ပုံတွင်ပြထားသည့်အတိုင်း X-NUCLEO-IKS4A1 accelerometer အာရုံခံကိရိယာတွင် SEU (x-South, y- East, z-Up) ရှိသည်၊ ထို့ကြောင့် string မှာ- "seu" ဖြစ်သည်။
ပုံ 1. Sensor orientation example
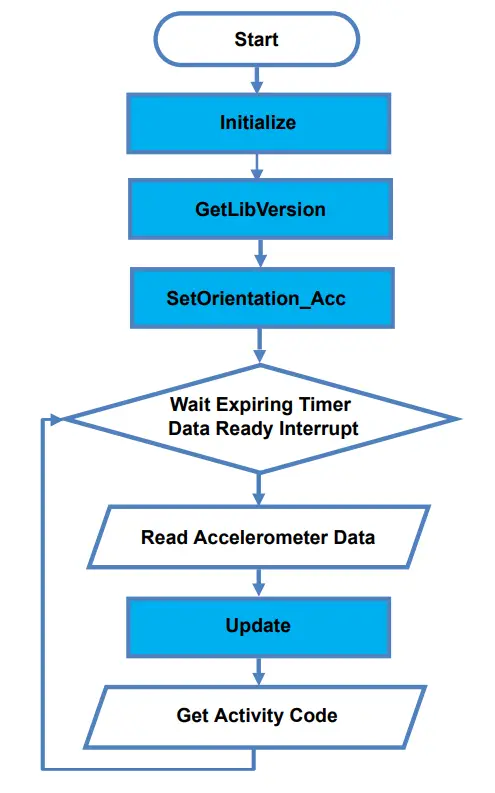
API စီးဆင်းမှု char
ပုံ 2. ရွေ့လျားမှု AR API ယုတ္တိဗေဒ အစီအစဥ်
ဒီမိုကုဒ်
အောက်ပါသရုပ်ပြကုဒ်သည် accelerometer အာရုံခံကိရိယာမှဒေတာကိုဖတ်ပြီး လုပ်ဆောင်ချက်ကုဒ်ကို ရယူသည်။
[…] #define VERSION_STR_LENG 35 […] /*** အစပြုခြင်း ***/ char lib_version[VERSION_STR_LENG]; char acc_orientation[] = "seu"; /* လုပ်ဆောင်ချက် အသိအမှတ်ပြုခြင်း API ကနဦးလုပ်ဆောင်မှု */ MotionAR_Initialize(); /* ရွေးချယ်နိုင်သော- ဗားရှင်းကို ရယူပါ */ MotionAR_GetLibVersion(lib_version); /* အရှိန်ထိန်းမီတာ သတ်မှတ်ခြင်း */ MotionAR_SetOrientation_Acc(acc_orientation); […] /*** လုပ်ဆောင်ချက် မှတ်သားမှု အယ်လဂိုရီသမ်ကို အသုံးပြုခြင်း ***/ Timer_ OR_ Data Rate_ Interrupt_ Handler() {
MAR_input_t data_ in; MAR_ output_ t လှုပ်ရှားမှု; /* g ဖြင့် X/Y/Z အရှိန်ရယူပါ */ MEMS_Read_AccValue(&data_in.acc_x, &data_in.acc_y, &data_in.acc_z); /* လက်ရှိအချိန်ကို ms */ TIMER_Get_TimeValue(×tamp_ဒေါ်); /* လုပ်ဆောင်ချက် အသိအမှတ်ပြုမှု အယ်လဂိုရီသမ် အပ်ဒိတ် */ MotionAR_Update(ဒေတာ_ဝင်၊ ဒေတာ_ထွက်၊ အချိန် နောက်ဆုံးamp_ဒေါ်); }
Algorithm စွမ်းဆောင်ရည်
လုပ်ဆောင်ချက် အသိအမှတ်ပြုခြင်း အယ်လဂိုရီသမ်သည် အရှိန်မြှင့်မီတာမှ ဒေတာကိုသာ အသုံးပြုပြီး ပါဝါသုံးစွဲမှုကို လျှော့ချရန်အတွက် ကြိမ်နှုန်းနိမ့် (16 Hz) ဖြင့် လုပ်ဆောင်သည်။
ဇယား 2. Algorithm စွမ်းဆောင်ရည်
| လှုပ်ရှားမှု | ထောက်လှမ်းခြင်း ဖြစ်နိုင်ခြေ (ပုံမှန်)(၄) | အကောင်းဆုံးစွမ်းဆောင်ရည် | ဖြစ်စရာ | ရာထူးတွေ ထမ်း |
| စာရေးကိရိယာ | 92.27% | လက်ထဲတွင် ကိုင်ထားပြီး လေးလံသော စာတိုပေးပို့ခြင်း။ | အားလုံး- ဘောင်းဘီအိတ်၊ ရှပ်အိတ်၊ နောက်ကျောအိတ်၊ ဦးခေါင်းအနီး စသည်ဖြင့်။ | |
| လမ်းလျှောက် | 99.44% | အဆင့်နှုန်း ≥ 1.4 အဆင့်/စက္ကန့် | အဆင့်နှုန်း ≤ 1.2 step/s | အားလုံး |
| အမြန်လမ်းလျှောက်ပါ။ | 95.94% | အဆင့်နှုန်း ≥ 2.0 အဆင့်/စက္ကန့် | အားလုံး | |
| ရွရွပြေးခြင်း။ | 98.49% | အဆင့်နှုန်း ≥ 2.2 အဆင့်/စက္ကန့် | ကြာချိန် < 1 မိနစ်; မြန်နှုန်း < 8 Km/h | ဘောင်းဘီအိတ်၊ လက်လွှဲ၊ လက်နှင့် |
| စက်ဘီးစီးတယ်။ | 91.93% | ပြင်ပအမြန်နှုန်း ≥11 Km/h | ခရီးသည်ထိုင်ခုံ၊ လက်အိတ်အခန်း | ကျောပိုးအိတ်၊ အင်္ကျီအိတ်၊ ဘောင်းဘီအိတ် |
| ကားမောင်းသည်။ | 78.65% | အမြန်နှုန်း ≥ 48 Km/h | ခရီးသည်ထိုင်ခုံ၊ လက်အိတ်အခန်း | ခွက်ကိုင်ဆောင်၊ ဒက်ရှ်ဘုတ်၊ အင်္ကျီအိတ်၊ ဘောင်းဘီအိတ် |
- ပုံမှန်သတ်မှတ်ချက်များကို အာမမခံနိုင်ပါ။
ဇယား 3. Cortex-M4 နှင့် Cortex-M3- ကြာမြင့်ချိန် (µs) algorithm
| Cortex-M4 STM32F401RE မှာ 84 MHz ဖြစ်သည်။ | Cortex-M3 STM32L152RE မှာ 32 MHz ဖြစ်သည်။ | ||||
| မင်း | ပျမ်းမျှ | မက်တယ်။ | မင်း | ပျမ်းမျှ | မက်တယ်။ |
| 2 | 6 | 153 | 8 | 130 | 4883 |
ဇယား 4. Cortex-M33 နှင့် Cortex-M7- ကြာမြင့်ချိန် (μs) algorithm
| Cortex-M33 STM32U575ZI-Q တွင် 160 MHz | Cortex-M7 STM32F767ZI မှာ 96 MHz ဖြစ်သည်။ | ||||
| မင်း | ပျမ်းမျှ | မက်တယ်။ | မင်း | ပျမ်းမျှ | မက်တယ်။ |
| < ၃ | 2 | 74 | 5 | 9 | 145 |
Sample လျှောက်လွှာ
MotionAR အလယ်တန်းဆော့ဖ်ဝဲကို အသုံးပြုသူအပလီကေးရှင်းများတည်ဆောက်ရန်အတွက် အလွယ်တကူ ခြယ်လှယ်နိုင်သည်။ အဖြစ်ample အပလီကေးရှင်းကို အပလီကေးရှင်းဖိုဒါတွင် ပေးထားသည်။
၎င်းကို X-NUCLEO-F401RE၊ NUCLEO-L152RE သို့မဟုတ် NUCLEO-U575ZI-Q ဖွံ့ဖြိုးတိုးတက်ရေးဘုတ်အဖွဲ့တွင် လုပ်ဆောင်ရန် ဒီဇိုင်းထုတ်ထားသည်။
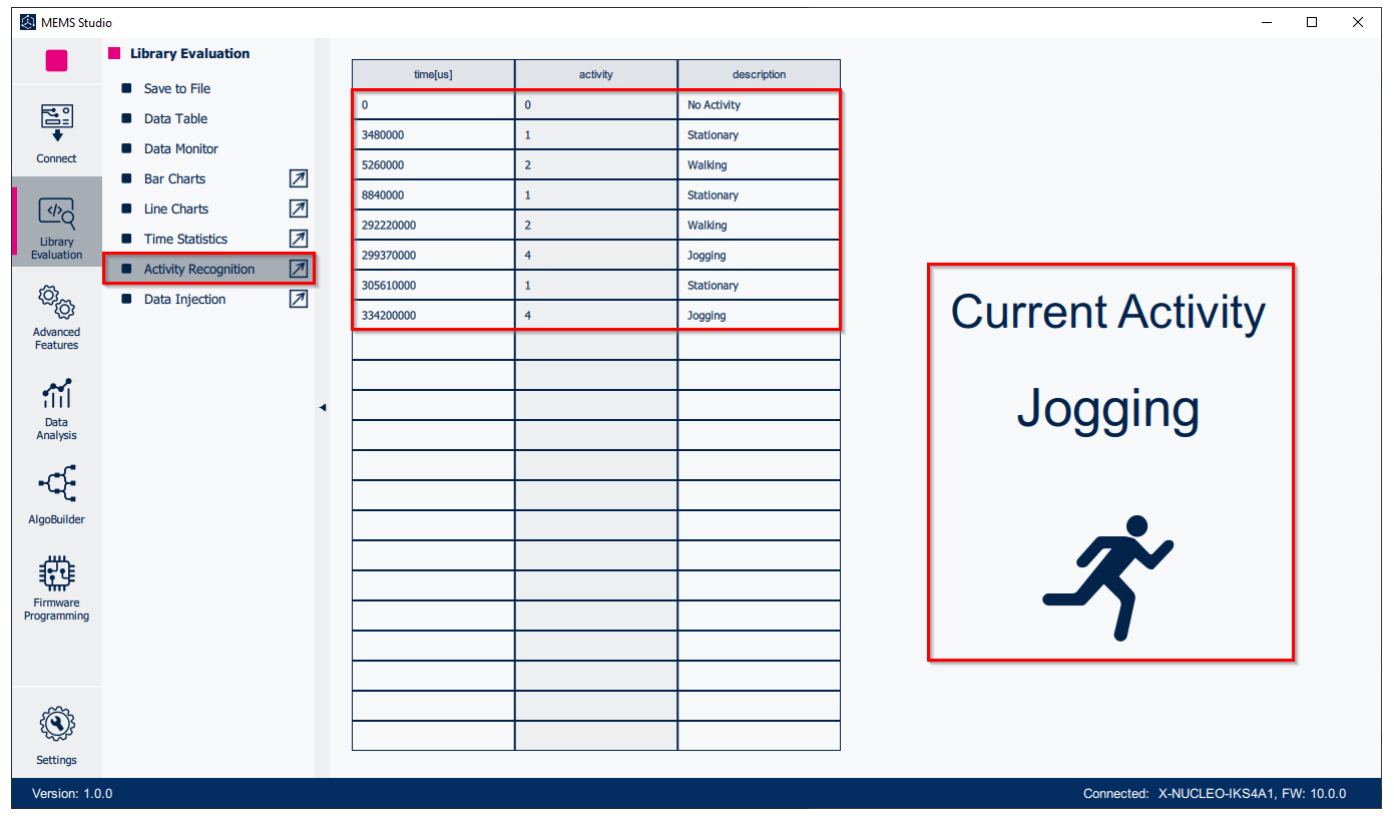
အပလီကေးရှင်းသည် အချိန်နှင့်တပြေးညီ လုပ်ဆောင်ခဲ့သော လုပ်ဆောင်ချက်များကို အသိအမှတ်ပြုသည်။ ဒေတာကို GUI မှတဆင့်ပြသနိုင်သည်။ အယ်လဂိုရီသမ်သည် မတ်တပ်ရပ်ခြင်း၊ လမ်းလျှောက်ခြင်း၊ အမြန်လမ်းလျှောက်ခြင်း၊ ရွရွပြေးခြင်း၊ စက်ဘီးစီးခြင်းနှင့် ကားမောင်းခြင်းတို့ကို အသိအမှတ်ပြုသည်။ အချိန်နှင့်တစ်ပြေးညီဒေတာကိုစောင့်ကြည့်ရန် USB ကြိုးချိတ်ဆက်မှုလိုအပ်သည်။ ဘုတ်အား USB ချိတ်ဆက်မှုမှတစ်ဆင့် PC မှ ပါဝါပေးပါသည်။ ၎င်းသည် အသုံးပြုသူကို ရှာဖွေတွေ့ရှိထားသော လုပ်ဆောင်ချက်၊ အရှိန်မြှင့်မီတာဒေတာ၊ အချိန်စဥ်ကို ပြသရန် ခွင့်ပြုသည်။amp MEMS-Studio GUI အပလီကေးရှင်းကို အသုံးပြု၍ အခြားအာရုံခံကိရိယာဒေတာကို အချိန်နှင့်တပြေးညီ၊
MEMS-Studio အက်ပ်
အဆိုပါ s ကိုample အပလီကေးရှင်းသည် MEMS-Studio GUI အပလီကေးရှင်းကို အသုံးပြု၍ ဒေါင်းလုဒ်လုပ်နိုင်သည်။ www.st.com.
အဆင့် ၁။ လိုအပ်သော ဒရိုက်ဗာများကို တပ်ဆင်ပြီး သင့်လျော်သော တိုးချဲ့ဘုတ်ပါရှိသော STM32 Nucleo ဘုတ်အား PC နှင့် ချိတ်ဆက်ထားကြောင်း သေချာပါစေ။
အဆင့် ၁။ ပင်မအပလီကေးရှင်းဝင်းဒိုးကိုဖွင့်ရန် MEMS-Studio အပလီကေးရှင်းကိုဖွင့်ပါ။
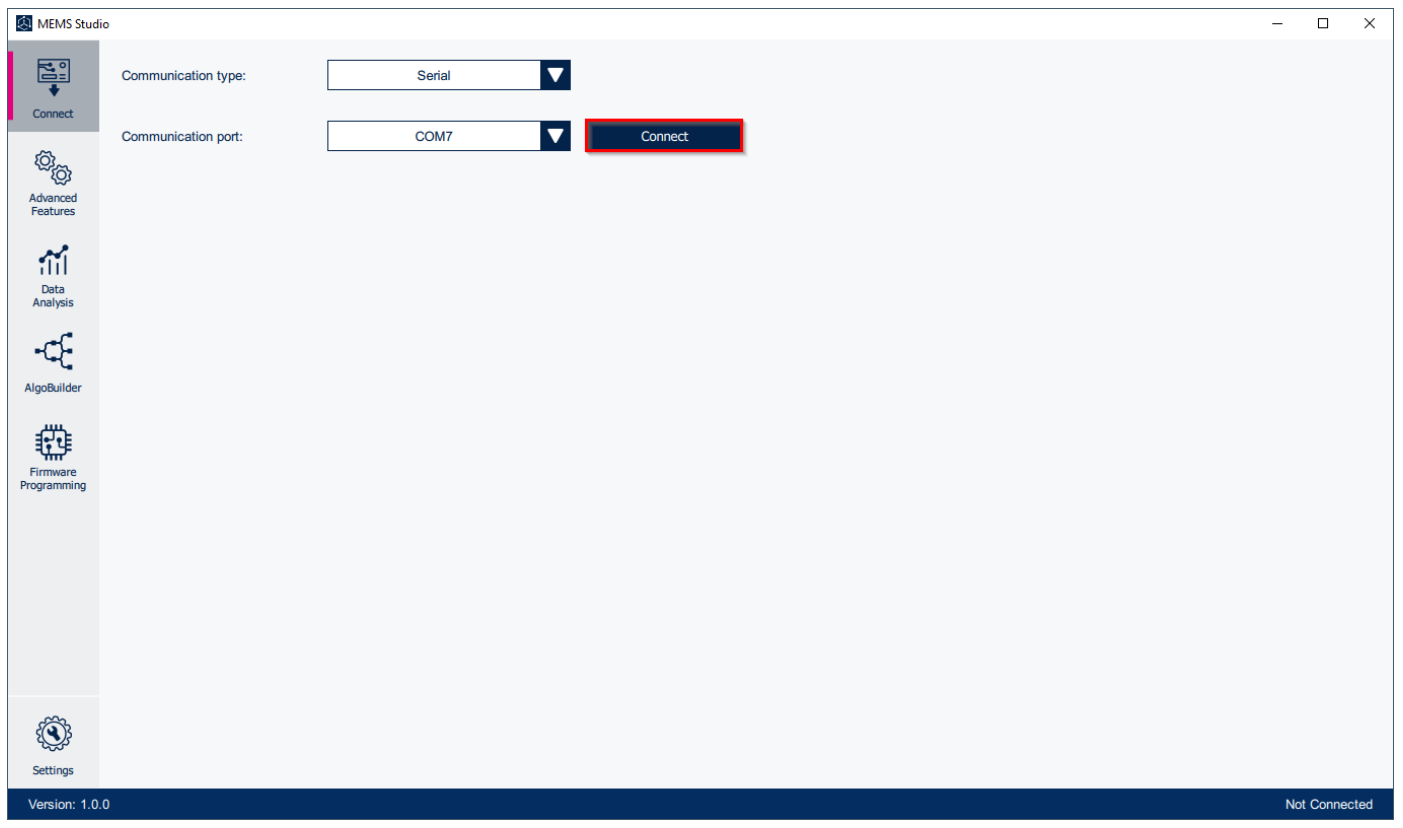
ပံ့ပိုးထားသော ဆော့ဖ်ဝဲပါရှိသော STM32 Nucleo ဘုတ်အား PC နှင့် ချိတ်ဆက်ထားပါက ၎င်းသည် သင့်လျော်သော COM port ကို အလိုအလျောက် တွေ့ရှိမည်ဖြစ်သည်။ ဤဆိပ်ကမ်းကိုဖွင့်ရန် ချိတ်ဆက်ခလုတ်ကို နှိပ်ပါ။
ပုံ 3. MEMS-Studio – ချိတ်ဆက်ပါ။
အဆင့် ၁။ ပံ့ပိုးထားသော Firmware ဖြင့် STM32 Nucleo ဘုတ်သို့ ချိတ်ဆက်သည့်အခါ Library အကဲဖြတ်ခြင်း တက်ဘ်ကို ဖွင့်ထားသည်။
ဒေတာစီးကြောင်းကို စတင်ခြင်းနှင့် ရပ်တန့်ရန် သင့်လျော်သည့်အရာကို ပြောင်းပါ။ ![]() စတင် /
စတင် / ![]() ဒေါင်လိုက်တူးလ်ဘားပေါ်ရှိ ခလုတ်ကို ရပ်တန့်ပါ။
ဒေါင်လိုက်တူးလ်ဘားပေါ်ရှိ ခလုတ်ကို ရပ်တန့်ပါ။
ချိတ်ဆက်ထားသော အာရုံခံကိရိယာမှလာသော ဒေတာများ ဖြစ်နိုင်ပါသည်။ viewအတွင်းဒေါင်လိုက်တူးလ်ဘားရှိ ဒေတာဇယားတက်ဘ်ကို ရွေးချယ်ခြင်း။
ပုံ 4. MEMS-Studio – Library Evaluation – Data Table
ပုံ ၇။ MEMS-Studio - စာကြည့်တိုက် အကဲဖြတ်ခြင်း - လုပ်ဆောင်ချက် အသိအမှတ်ပြုခြင်း။
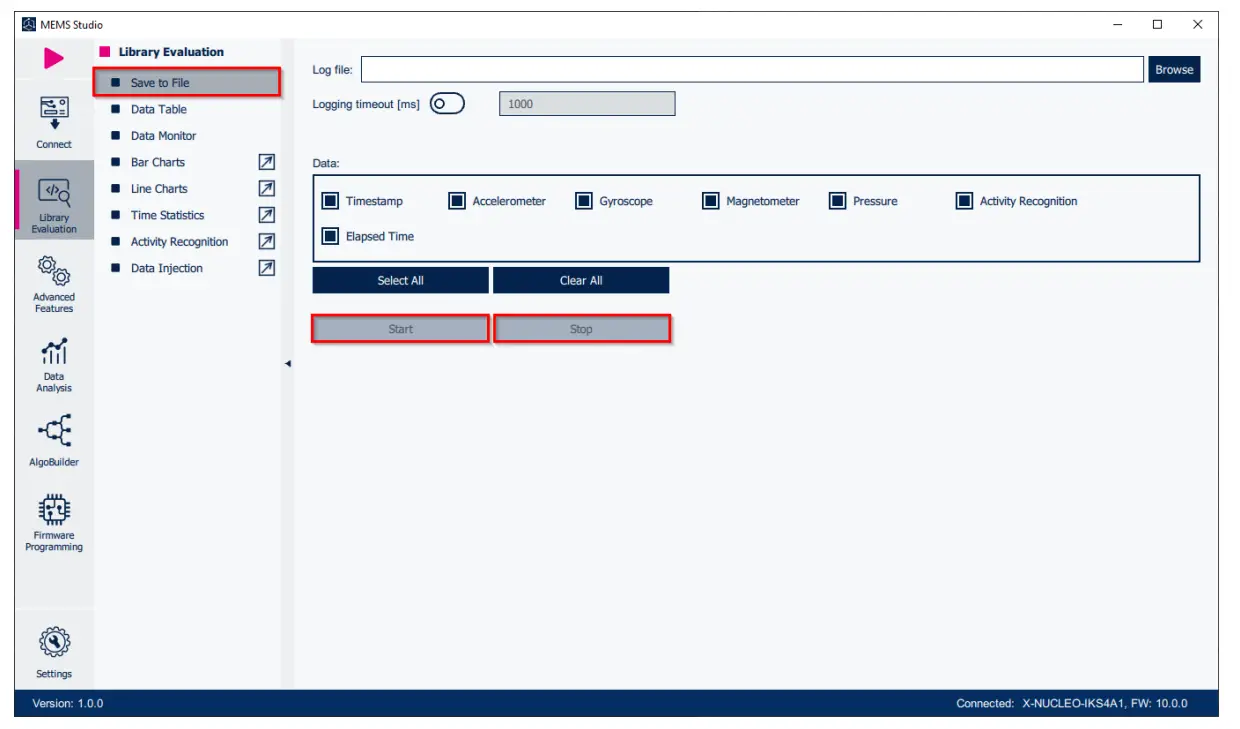
အဆင့် ၁။ Save to ကို ရွေးပါ။ File ဒေတာမှတ်တမ်းထည့်သွင်းမှုပုံစံဝင်းဒိုးကိုဖွင့်ရန် အတွင်းဒေါင်လိုက်တူးလ်ဘားပေါ်ရှိ တက်ဘ်။ မှတ်တမ်းအဖြစ် သိမ်းဆည်းရန် မည်သည့်အာရုံခံကိရိယာနှင့် လုပ်ဆောင်ချက်ဒေတာကို ရွေးချယ်ပါ။ file. သက်ဆိုင်ရာ Start/Stop ခလုတ်ကို နှိပ်ခြင်းဖြင့် စတင်သိမ်းဆည်းခြင်း သို့မဟုတ် ရပ်နိုင်ပါသည်။
ပုံ 6. MEMS-Studio – Library Evaluation – သို့ သိမ်းဆည်းပါ။ File
ကိုးကား
အောက်ဖော်ပြပါ အရင်းအမြစ်များအားလုံးကို လွတ်လပ်စွာ ရနိုင်ပါသည်။ www.st.com.
- UM1859- STM1Cube အတွက် X-CUBE-MEMS32 ရွေ့လျားမှု MEMS နှင့် ပတ်ဝန်းကျင်အာရုံခံကိရိယာဆော့ဖ်ဝဲချဲ့ထွင်ခြင်းဖြင့် စတင်ခြင်း
- UM1724- STM32 Nucleo-64 ဘုတ်များ (MB1136)
- UM3233- MEMS-Studio ဖြင့် စတင်ခြင်း။
ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
ဇယား ၁။ စာရွက်စာတမ်း ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
| ရက်စွဲ | ဗားရှင်း | အပြောင်းအလဲများ |
| ၂၄-ဧပြီ-၂၀၁၉ | 1 | ကနဦး ထုတ်ဝေမှု။ |
| 26-Jan-2018 | 2 | အပိုင်း 3 S ကို အပ်ဒိတ်လုပ်ထားသည်။ample လျှောက်လွှာ။ NUCLEO-L152RE ဖွံ့ဖြိုးတိုးတက်မှုဘုတ်အဖွဲ့နှင့် ဇယား 3 သို့ ကိုးကားချက်များထည့်ထားသည်။ လွန်သွားသောအချိန် (μs) algorithm။ |
| 19-Mar-2018 ရက် | 3 | မွမ်းမံထားသော နိဒါန်း၊ အပိုင်း 2.1 Motion AR ပြီးပါပြီ။view နှင့် အပိုင်း 2.2.5 Algorithm စွမ်းဆောင်ရည်။ |
| ၂၇-ဖေဖော်ဝါရီ-၂၀၁၈ | 4 | အပ်ဒိတ်လုပ်ထားသော ပုံ 1. အာရုံခံ တိမ်းညွှတ်မှု example၊ ဇယား 3. လွန်သွားသောအချိန် (µs) algorithm နှင့် ပုံ 3. STM32 Nucleo- LEDs၊ ခလုတ်၊ jumper။ X-NUCLEO-IKS01A3 တိုးချဲ့ဘုတ်အဖွဲ့ တွဲဖက်အသုံးပြုနိုင်သည့် အချက်အလက်ကို ထည့်သွင်းထားသည်။ |
| 20-Mar-2019 ရက် | 5 | အပ်ဒိတ်အပိုင်း 2.2.2 Motion AR APIs၊ ပုံ 3. MEMS-Studio – Connect, ပုံ 4. MEMS-Studio – Library Evaluation – Data Table, Figure 5. MEMS-Studio – Library Evaluation – Activity Recognition and Figure 6. MEMS-Studio - စာကြည့်တိုက်အကဲဖြတ်ခြင်း - သို့သိမ်းဆည်းပါ။ File. |
| ၂၄-ဧပြီ-၂၀၁၉ | 6 | မွမ်းမံ အပိုင်း နိဒါန်း, အပိုင်း 2.1- MotionAR ပြီးပါပြီ။view, အပိုင်း 2.2.1- MotionAR စာကြည့်တိုက် ဖော်ပြချက်၊ MotionAR APIs၊ အပိုင်း 2.2.4- သရုပ်ပြကုဒ်, အပိုင်း 2.2.5- Algorithm စွမ်းဆောင်ရည်, အပိုင်း 3: Sample လျှောက်လွှာ နှင့် အပိုင်း 4- MEMS-Studio အက်ပ်လီကေးရှင်း. |
အရေးကြီးသတိပေးချက် - ဂရုတစိုက်ဖတ်ပါ။
STMicroelectronics NV နှင့် ၎င်း၏လုပ်ငန်းခွဲများ (“ST”) သည် ST ထုတ်ကုန်များနှင့်/သို့မဟုတ် ဤစာရွက်စာတမ်းအား အသိပေးခြင်းမရှိဘဲ အပြောင်းအလဲများ၊ ပြုပြင်မှုများ၊ မြှင့်တင်မှုများ၊ ပြုပြင်မွမ်းမံမှုများနှင့် တိုးတက်မှုများကို အချိန်မရွေးပြုလုပ်ရန် လက်ဝယ်ရှိသည်။ အမှာစာမတင်မီ ဝယ်ယူသူများသည် ST ထုတ်ကုန်များဆိုင်ရာ နောက်ဆုံးရသက်ဆိုင်ရာအချက်အလက်များကို ရယူသင့်ပါသည်။ ST ထုတ်ကုန်များကို အမှာစာလက်ခံသည့်အချိန်တွင် ST ၏ရောင်းချမှုစည်းမျဉ်းစည်းကမ်းများနှင့်အညီ ရောင်းချပါသည်။
ဝယ်ယူသူများသည် ST ထုတ်ကုန်များ၏ ရွေးချယ်မှု၊ ရွေးချယ်မှုနှင့် အသုံးပြုမှုအတွက် တစ်ခုတည်းတွင် တာဝန်ရှိပြီး ST သည် လျှောက်လွှာအကူအညီ သို့မဟုတ် ဝယ်ယူသူများ၏ ထုတ်ကုန်ဒီဇိုင်းအတွက် တာဝန်မရှိဟု ယူဆပါသည်။
ဤနေရာတွင် ST မှ ပေးအပ်သည့် မည်သည့်ဉာဏပစ္စည်းမူပိုင်ခွင့်ကိုမဆို လိုင်စင်၊ ဖော်ပြခြင်း သို့မဟုတ် အဓိပ္ပာယ်ဖွင့်ဆိုထားခြင်းမရှိပါ။
ဤနေရာတွင်ဖော်ပြထားသော အချက်အလက်များနှင့် ကွဲပြားသော ပြဋ္ဌာန်းချက်များရှိသော ST ထုတ်ကုန်များကို ပြန်လည်ရောင်းချခြင်းသည် ထိုထုတ်ကုန်အတွက် ST မှပေးသော အာမခံတစ်စုံတစ်ရာကို ပျက်ပြယ်စေမည်ဖြစ်သည်။
ST နှင့် ST လိုဂိုများသည် ST ၏ကုန်အမှတ်တံဆိပ်များဖြစ်သည်။ ST အမှတ်တံဆိပ်များအကြောင်း နောက်ထပ်အချက်အလက်များအတွက် ကိုးကားပါ။ www.st.com/trademarks. အခြားထုတ်ကုန် သို့မဟုတ် ဝန်ဆောင်မှုအမည်များအားလုံးသည် ၎င်းတို့၏ သက်ဆိုင်ရာပိုင်ရှင်များ၏ ပိုင်ဆိုင်မှုဖြစ်သည်။
ဤစာရွက်စာတမ်းရှိ အချက်အလက်ကို အစားထိုးပြီး ဤစာရွက်စာတမ်း၏ ယခင်ဗားရှင်းတစ်ခုခုတွင် ယခင်က ပေးခဲ့သည့် အချက်အလက်များကို အစားထိုးသည်။
© 2024 STMicroelectronics - အခွင့်အရေးအားလုံးကို လက်ဝယ်ရှိသည်။

စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
STMicroelectronics UM2193 MotionAR လုပ်ဆောင်ချက် အသိအမှတ်ပြု စာကြည့်တိုက် [pdf] အသုံးပြုသူလက်စွဲ UM2193 MotionAR လုပ်ဆောင်ချက် အသိအမှတ်ပြုစာကြည့်တိုက်၊ UM2193၊ MotionAR လုပ်ဆောင်ချက် အသိအမှတ်ပြုစာကြည့်တိုက်၊ လုပ်ဆောင်ချက် အသိအမှတ်ပြုစာကြည့်တိုက်၊ အသိအမှတ်ပြုစာကြည့်တိုက်၊ စာကြည့်တိုက် |


