ST Microelectronics NUCLEO-F401RE အချိန်နှင့်တပြေးညီ Pose ခန့်မှန်းချက်စာကြည့်တိုက်

ထုတ်ကုန်အချက်အလက်
သတ်မှတ်ချက်များ
- ကုန်ပစ္စည်းအမည်- MotionPE သည် အချိန်နှင့်တပြေးညီ ဟန်ပြခန့်မှန်းချက် စာကြည့်တိုက်
- လိုက်ဖက်ညီမှု- STM1Cube အတွက် X-CUBE-MEMS32 တိုးချဲ့မှု
- ST MEMS အတွက်သာ ဒီဇိုင်းထုတ်ထားသည်။
- Accelerometer ဒေတာ Sampling Frequency: 16 Hz
ထုတ်ကုန်အသုံးပြုမှု ညွှန်ကြားချက်များ
MotionPE စာကြည့်တိုက်ပြီးပါပြီ။view:
MotionPE စာကြည့်တိုက်သည် အသုံးပြုသူ၏လက်ရှိပုံသဏ္ဍာန်နှင့်ပတ်သက်သော အချက်အလက်များကို ပံ့ပိုးပေးရန်အတွက် X-CUBE-MEMS1 ဆော့ဖ်ဝဲ၏ လုပ်ဆောင်နိုင်စွမ်းကို ချဲ့ထွင်ပေးပါသည်။
Sampအကောင်အထည်ဖော်ခြင်း-
၎ampအကောင်အထည်ဖော်မှုကို NUCLEO ဖွံ့ဖြိုးတိုးတက်ရေးဘုတ်များပေါ်တွင်တပ်ဆင်ထားသည့် X-NUCLEO-IKS01A3 နှင့် X-NUCLEO-IKS4A1 တိုးချဲ့ဘုတ်များအတွက် ရနိုင်ပါသည်။
MotionPE Library ဖော်ပြချက်-
MotionPE pose positimation library သည် accelerometer data ကိုအခြေခံ၍ မှတ်သားမှုဖြင့် လက်ပတ်ဝတ်ဆင်ထားသော စက်ပစ္စည်းများအတွက် ရည်ရွယ်ထားသော ထိုင်ခြင်း၊ မတ်တပ်ရပ်ခြင်းနှင့် လဲလျောင်းခြင်းကဲ့သို့ သုံးစွဲသူ၏ကိုယ်ဟန်များကို ခွဲခြားနိုင်ပါသည်။
MotionPE Library API များ
MotionPE_GetLibVersion(char *version): စာကြည့်တိုက်ကို ရယူပါ။
ဗားရှင်းသတင်းအချက်အလက်။MotionPE_Initialize(): ကို စတင်လိုက်ပါ။
စာကြည့်တိုက်။MotionPE_ResetLib(): စာကြည့်တိုက်ကို ပြန်လည်သတ်မှတ်ပါ။MotionPE_Update(MPE_input_t *data_in, MPE_output_t: အရှိန်မြှင့်မီတာဒေတာဖြင့် စာကြည့်တိုက်ကို အပ်ဒိတ်လုပ်ပါ။
*data_out)MotionPE_SetOrientation_Acc(const char: အရှိန်မြှင့်မီတာကို တိမ်းညွှတ်မှု သတ်မှတ်ပါ။
*acc_orientation)
အမေးများသောမေးခွန်းများ
- မေး- ST MEMS မဟုတ်သော အာရုံခံကိရိယာများဖြင့် MotionPE စာကြည့်တိုက်ကို သုံးနိုင်ပါသလား။
- A- စာကြည့်တိုက်သည် ST MEMS အတွက်သာ ဒီဇိုင်းထုတ်ထားသည်။ အခြား MEMS အာရုံခံကိရိယာများကို အသုံးပြုခြင်းသည် မတူညီသော လုပ်ဆောင်နိုင်စွမ်းနှင့် စွမ်းဆောင်ရည်ကို ဖြစ်ပေါ်စေနိုင်သည်။
- Q: လိုအပ်သော accelerometer ဒေတာ s ကဘာလဲampMotionPE စာကြည့်တိုက်အတွက် ကြိမ်နှုန်းလား။
- A: လိုအပ်သော sampတိကျသော pose ခန့်မှန်းချက်အတွက် ling frequency သည် 16 Hz ဖြစ်သည်။
နိဒါန်း
MotionPE အလယ်တန်းဆော့ဖ်ဝဲစာကြည့်တိုက်သည် X-CUBE-MEMS1 ဆော့ဖ်ဝဲလ်၏တစ်စိတ်တစ်ပိုင်းဖြစ်ပြီး STM32 တွင်အလုပ်လုပ်သည်။ ၎င်းသည် စက်ပစ္စည်းတစ်ခုမှ ဒေတာအပေါ်အခြေခံ၍ အသုံးပြုသူ၏ လက်ရှိလုပ်ဆောင်ပုံနှင့်ပတ်သက်၍ အချိန်နှင့်တစ်ပြေးညီ အချက်အလက်ကို ပေးဆောင်သည်။ ထိုင်ခြင်း၊ မတ်တပ်ရပ်ခြင်းနှင့် လဲလျောင်းခြင်းတို့ကို ခွဲခြားနိုင်သည်။ စာကြည့်တိုက်သည် လက်ပတ်ပတ်ထားသော ကိရိယာများအတွက် ရည်ရွယ်ပါသည်။ ဤစာကြည့်တိုက်သည် ST MEMS နှင့်သာ အလုပ်လုပ်ရန် ရည်ရွယ်ပါသည်။ အယ်လဂိုရီသမ်ကို တည်ငြိမ်စာကြည့်တိုက်ဖော်မတ်ဖြင့် ပံ့ပိုးထားပြီး ARM® Cortex®-M32၊ ARM® Cortex®-M3၊ ARM® Cortex®-M33 သို့မဟုတ် ARM® Cortex®-M4 ဗိသုကာကို အခြေခံ၍ STM7 မိုက်ခရိုကွန်ထရိုလာများတွင် အသုံးပြုရန် ဒီဇိုင်းထုတ်ထားသည်။ မတူညီသော STM32 မိုက်ခရိုကွန်ထရိုလာများတွင် သယ်ဆောင်ရလွယ်ကူစေရန် STM32Cube ဆော့ဖ်ဝဲနည်းပညာ၏ထိပ်တွင် တည်ဆောက်ထားသည်။ software သည် s နှင့်လာပါသည်။ampNUCLEO-F01RE၊ NUCLEO-U3ZI-Q သို့မဟုတ် NUCLEO-L4RE ဖွံ့ဖြိုးတိုးတက်ရေးဘုတ်အဖွဲ့တွင် X-NUCLEO-IKS1A401 သို့မဟုတ် X-NUCLEO-IKS575A152expansion ဘုတ်ပေါ်တွင် လုပ်ဆောင်နေသည့် အကောင်အထည်ဖော်မှု။
အတိုကောက်များနှင့် အတိုကောက်များ
ဇယား ၁။ အတိုကောက်များစာရင်း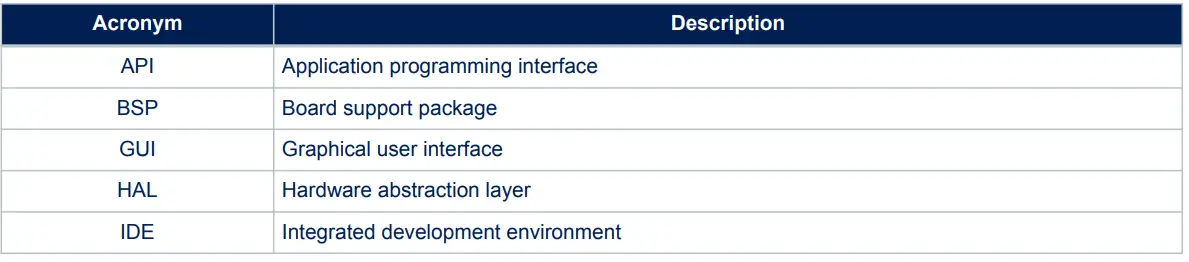
STM1Cube အတွက် X-CUBE-MEMS32 ဆော့ဖ်ဝဲလ်တိုးချဲ့မှုတွင် MotionPE အလယ်တန်းဆော့ဖ်ဝဲစာကြည့်တိုက်
MotionPE ပြီးပါပြီ။view
MotionPE စာကြည့်တိုက်သည် X-CUBE-MEMS1 ဆော့ဖ်ဝဲလ်၏ လုပ်ဆောင်နိုင်စွမ်းကို ချဲ့ထွင်ပေးသည်။ စာကြည့်တိုက်သည် accelerometer မှ ဒေတာကို ရယူပြီး စက်ပစ္စည်းတစ်ခုမှ ဒေတာအပေါ်အခြေခံ၍ အသုံးပြုသူ၏ လက်ရှိပုံသဏ္ဍာန်နှင့်ပတ်သက်သော အချက်အလက်များကို ပံ့ပိုးပေးပါသည်။ စာကြည့်တိုက်သည် ST MEMS အတွက်သာ ဒီဇိုင်းထုတ်ထားသည်။ အခြား MEMS အာရုံခံကိရိယာများကို အသုံးပြုသည့်အခါ လုပ်ဆောင်နိုင်စွမ်းနှင့် စွမ်းဆောင်ရည်ကို ခွဲခြမ်းစိတ်ဖြာခြင်းမပြုဘဲ စာရွက်စာတမ်းတွင်ဖော်ပြထားသည့်အရာများနှင့် သိသိသာသာကွဲပြားနိုင်သည်။ ၎ampအကောင်အထည်ဖော်မှုအား NUCLEO-F01RE၊ NUCLEO-U3ZI-Q သို့မဟုတ် NUCLEO-L4RE ဖွံ့ဖြိုးတိုးတက်မှုဘုတ်အဖွဲ့တွင်တပ်ဆင်ထားသော X-NUCLEO-IKS1A401 နှင့် X-NUCLEO-IKS575A152 တိုးချဲ့ဘုတ်များအတွက် ရရှိနိုင်ပါသည်။
MotionPE စာကြည့်တိုက်
MotionPE APIs ၏ လုပ်ဆောင်ချက်များနှင့် ကန့်သတ်ချက်များကို ဖော်ပြသည့် နည်းပညာဆိုင်ရာ အချက်အလက်ကို MotionPE_Package.chm ပြုစုထားသော HTML တွင် တွေ့နိုင်ပါသည်။ file Documentation folder တွင် တည်ရှိသည်။
MotionPE စာကြည့်တိုက်ဖော်ပြချက်
MotionPE pose ခန့်မှန်းချက်စာကြည့်တိုက်သည် accelerometer မှရရှိသောဒေတာများကိုစီမံခန့်ခွဲသည်။ ၎င်းတွင်အင်္ဂါရပ်များ:
- အောက်ဖော်ပြပါ အသုံးပြုသူ၏ ကိုယ်ဟန်အနေအထားကို ခွဲခြားရန် ဖြစ်နိုင်ခြေ- ထိုင်ခြင်း၊ ရပ်ခြင်း၊ လဲလျောင်းခြင်း။
- လက်ပတ်ပတ်ထားတဲ့ စက်ပစ္စည်းတွေအတွက် ရည်ရွယ်ပါတယ်။
- accelerometer ဒေတာပေါ်တွင်သာအခြေခံပြီးအသိအမှတ်ပြုမှု
- လိုအပ်သော accelerometer ဒေတာ sampလင်ကြိမ်နှုန်း 16 Hz
- အရင်းအမြစ်လိုအပ်ချက်များ
- Cortex-M3- ကုဒ်၏ 12.0 kB နှင့် ဒေတာမှတ်ဉာဏ် 2.8 kB
- Cortex-M33- ကုဒ်၏ 12.5kB နှင့် ဒေတာမှတ်ဉာဏ် 2.8kB
- Cortex-M4- ကုဒ်၏ 12.9 kB နှင့် ဒေတာမှတ်ဉာဏ် 2.8 kB
- Cortex-M7- ကုဒ်၏ 12.9 kB နှင့် ဒေတာမှတ်ဉာဏ် 2.8kB
- ARM® Cortex®-M3၊ ARM Cortex®-M33၊ ARM® Cortex®-M4 သို့မဟုတ် ARM® Cortex®-M7 ဗိသုကာများ အတွက် ရနိုင်ပါသည်။
MotionPE API များ
MotionPE စာကြည့်တိုက် API များမှာ-
- uint8_t MotionPE_GetLibVersion(char *ဗားရှင်း)
- စာကြည့်တိုက်ဗားရှင်းကို ထုတ်ယူသည်။
- *ဗားရှင်းသည် စာလုံး 35 လုံးပါသော array တစ်ခုဆီသို့ ညွှန်ပြချက်တစ်ခုဖြစ်သည်။
- ဗားရှင်းစာကြောင်းရှိ စာလုံးအရေအတွက်ကို ပြန်ပေးသည်။
- MotionPE_Initialize(ပျက်ပြယ်)
- MotionPE စာကြည့်တိုက်ကို အစပြုခြင်းနှင့် အတွင်းပိုင်းယန္တရား၏ တည်ဆောက်မှုကို လုပ်ဆောင်သည်။
မှတ်ချက်- ဤလုပ်ဆောင်ချက်ကို pose estimation library ကိုအသုံးမပြုမီနှင့် STM32 microcontroller ရှိ CRC module (RCC peripheral clock enable register တွင်) ကိုဖွင့်ထားရမည်ဖြစ်ပြီး စာကြည့်တိုက်ကို အသုံးမပြုမီ ဖွင့်ထားရပါမည်။
- MotionPE စာကြည့်တိုက်ကို အစပြုခြင်းနှင့် အတွင်းပိုင်းယန္တရား၏ တည်ဆောက်မှုကို လုပ်ဆောင်သည်။
- MotionPE_ResetLib(ပျက်ပြယ်)
- စာကြည့်တိုက်ကို ပြန်လည်သတ်မှတ်ပါ။
- MotionPE_Update(MPE_input_t *data_in၊ MPE_output_t *data_out) ပျက်ပြယ်သည်
- pose estimation algorithm ကို လုပ်ဆောင်သည်။
- *data_in ပါရာမီတာသည် ထည့်သွင်းဒေတာပါသည့် ဖွဲ့စည်းပုံသို့ ညွှန်ပြချက်တစ်ခုဖြစ်သည်။
- ဖွဲ့စည်းပုံအမျိုးအစား MPE_input_t အတွက် ဘောင်များသည်-
- AccX သည် g in X ဝင်ရိုးရှိ accelerometer အာရုံခံကိရိယာတန်ဖိုးဖြစ်သည်။
- AccY သည် g in Y ဝင်ရိုးရှိ အရှိန်မြှင့်မီတာ အာရုံခံကိရိယာတန်ဖိုးဖြစ်သည်။
- AccZ သည် g in Z ဝင်ရိုးရှိ accelerometer အာရုံခံကိရိယာတန်ဖိုးဖြစ်သည်။
- *data_out ဘောင်သည် အောက်ပါအရာများပါရှိသော enum သို့ ညွှန်ပြချက်တစ်ခုဖြစ်သည်။
- MPE_UNKNOWN = 0
- MPE_SITTING = ၁
- MPE_STANDING = ၂
- MPE_LYING_DOWN = ၃
- MotionPE_SetOrientation_Acc(const char *acc_orientation) ပျက်ပြယ်သည်
- accelerometer data orientation ကို သတ်မှတ်ရန် ဤလုပ်ဆောင်ချက်ကို အသုံးပြုသည်။
- MotionPE_Initialize လုပ်ဆောင်ချက်ခေါ်ဆိုမှုပြီးနောက် ချက်ခြင်းဖွဲ့စည်းမှုပုံစံကို လုပ်ဆောင်ပါသည်။
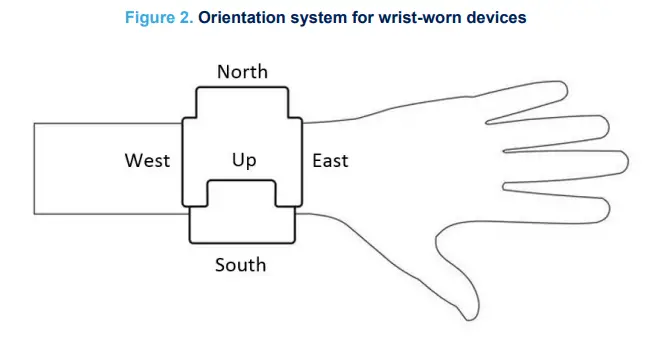
- *acc_orientation parameter သည် accelerometer data output အတွက်အသုံးပြုသည့် accelerometer data output အတွက် အသုံးပြုသည့် ရည်ညွှန်းဘောင်၏ အပြုသဘောဆောင်သော လမ်းကြောင်းတစ်ခုစီ၏ ဦးတည်ချက်ကို ညွှန်ပြသည့် စာလုံးသုံးလုံး၏ string တစ်ခုဆီသို့ ညွှန်ပြသည့်အချက်ဖြစ်သည်။ မှန်ကန်သောတန်ဖိုးများမှာ- n (မြောက်) သို့မဟုတ် s (တောင်)၊ w (အနောက်) သို့မဟုတ် e (အရှေ့)၊ u (အထက်) သို့မဟုတ် d (အောက်)။
- အောက်တွင်ဖော်ပြထားသည့်ပုံတွင်ပြထားသည့်အတိုင်း X-NUCLEO-IKS4A1 အရှိန်မြှင့်မီတာအာရုံခံကိရိယာတွင် SEU လမ်းကြောင်း (x – တောင်၊ y – အရှေ့၊ z – Up) ရှိသည်၊ ထို့ကြောင့် စာကြောင်းမှာ - “seu” ဖြစ်သည်။

API စီးဆင်းမှုဇယား
ဒီမိုကုဒ်
အောက်ဖော်ပြပါ သရုပ်ပြကုဒ်သည် အရှိန်မြှင့်မီတာအာရုံခံကိရိယာမှ ဒေတာကို ဖတ်ပြီး ခန့်မှန်းခြေဟန်ကို ရရှိသည်။

Algorithm စွမ်းဆောင်ရည်
pose estimation algorithm သည် accelerometer မှဒေတာများကိုသာအသုံးပြုပြီး ပါဝါသုံးစွဲမှုကိုလျှော့ချရန်အတွက် low frequency (16 Hz) ဖြင့်လုပ်ဆောင်သည်။ အောက်ဖော်ပြပါဇယားသည် အသိအမှတ်ပြုမှုအောင်မြင်မှုနှုန်းသတ်မှတ်ချက်များနှင့် pose estimation algorithm ၏စွမ်းဆောင်ရည်ကိုပြသသည်

Sample လျှောက်လွှာ
MotionPE အလယ်တန်းဆော့ဖ်ဝဲသည် သုံးစွဲသူအပလီကေးရှင်းများတည်ဆောက်ရန်အတွက် အလွယ်တကူ ကိုင်တွယ်နိုင်သည်။ ၎ample အပလီကေးရှင်းကို အပလီကေးရှင်းဖိုဒါတွင် ပေးထားသည်။ ၎င်းကို X-NUCLEO-F401RE၊ NUCLEOU575ZI- Q သို့မဟုတ် NUCLEO-L152RE ဖွံ့ဖြိုးတိုးတက်ရေးဘုတ်အဖွဲ့တွင် လုပ်ဆောင်ရန် ဒီဇိုင်းထုတ်ထားသည်။ အပလီကေးရှင်းသည် လက်ရှိအသုံးပြုသူပုံစံကို အချိန်နှင့်တစ်ပြေးညီ အသိအမှတ်ပြုသည်။

အထက်ပါပုံသည် သုံးစွဲသူခလုတ် B1 နှင့် NUCLEO-F401RE ဘုတ်၏ LED သုံးခုကို ပြသထားသည်။ boardis ကို ပါဝါဖွင့်ပြီးသည်နှင့် LED LD3 (PWR) ပွင့်သွားပါသည်။
မှတ်ချက်- ဘုတ်ကို ပါဝါဖွင့်ပြီးနောက်၊ အပလီကေးရှင်း အဆင်သင့်ဖြစ်ကြောင်း ညွှန်ပြသည်နှင့် LED LD2 မှိတ်တုတ်မှိတ်တုတ် ပေါ်လာသည်။ အချိန်နှင့်တစ်ပြေးညီဒေတာကိုစောင့်ကြည့်ရန် USB ကြိုးချိတ်ဆက်မှုလိုအပ်သည်။ ဘုတ်အား USB ချိတ်ဆက်မှုမှတစ်ဆင့် PC မှ ပါဝါပေးပါသည်။ ဤအလုပ်လုပ်မုဒ်သည် အသုံးပြုသူကို အချိန်နှင့်တစ်ပြေးညီ သိရှိနိုင်သော အသုံးပြုသူပုံသဏ္ဍာန်၊ အရှိန်မီတာဒေတာ၊ အချိန်စဥ်ကို ပြသရန် ခွင့်ပြုသည်။amp MEMS-Studio ကို အသုံးပြု၍ အခြားအာရုံခံကိရိယာဒေတာများ။
MEMS-Studio အက်ပ်
အဆိုပါ s ကိုample အပလီကေးရှင်းသည် www.st.com မှဒေါင်းလုဒ်လုပ်နိုင်သည့် MEMS-Studio အက်ပ်ကို အသုံးပြုသည်။
အဆင့် 1. လိုအပ်သော ဒရိုက်ဗာများကို တပ်ဆင်ပြီး သင့်လျော်သော တိုးချဲ့ဘုတ်ပြားပါရှိသော STM32 Nucleo ဘုတ်အား PC နှင့် ချိတ်ဆက်ထားကြောင်း သေချာပါစေ။
အဆင့် 2. ပင်မအပလီကေးရှင်းဝင်းဒိုးကိုဖွင့်ရန် MEMS-Studio အပလီကေးရှင်းကိုဖွင့်ပါ။ ပံ့ပိုးထားသော ဆော့ဖ်ဝဲပါရှိသော STM32 Nucleo ဘုတ်အား PC နှင့် ချိတ်ဆက်ထားပါက သင့်လျော်သော COM ပေါက်ကို အလိုအလျောက် တွေ့ရှိမည်ဖြစ်သည်။ အကဲဖြတ်ဘုတ်သို့ ချိတ်ဆက်မှုတည်ဆောက်ရန် [Connect] ခလုတ်ကို နှိပ်ပါ။
အဆင့် 3. ပံ့ပိုးထားသော Firmware [Library Evaluation] တက်ဘ်ကို STM32 Nucleo ဘုတ်နှင့် ချိတ်ဆက်သောအခါ ဖွင့်သည်။
ဒေတာထုတ်လွှင့်ခြင်းကို စတင်ရန်နှင့် ရပ်ရန် သင့်လျော်သော [Start] ကို ပြောင်းပါ။ ![]() သို့မဟုတ် [ရပ်ရန်]
သို့မဟုတ် [ရပ်ရန်]![]() ဒေါင်လိုက်တူးလ်ဘားပေါ်ရှိ ခလုတ်။ ချိတ်ဆက်ထားသော အာရုံခံကိရိယာမှလာသော ဒေတာများ ဖြစ်နိုင်ပါသည်။ viewအတွင်းဒေါင်လိုက်တူးလ်ဘားရှိ [ဒေတာဇယား] တက်ဘ်ကို ရွေးချယ်ခြင်းဖြင့် ed ။
ဒေါင်လိုက်တူးလ်ဘားပေါ်ရှိ ခလုတ်။ ချိတ်ဆက်ထားသော အာရုံခံကိရိယာမှလာသော ဒေတာများ ဖြစ်နိုင်ပါသည်။ viewအတွင်းဒေါင်လိုက်တူးလ်ဘားရှိ [ဒေတာဇယား] တက်ဘ်ကို ရွေးချယ်ခြင်းဖြင့် ed ။

အဆင့် 4. ဤစာကြည့်တိုက်အတွက် သီးသန့်စာမျက်နှာကိုဖွင့်ရန် [Pose Estimation] ကိုနှိပ်ပါ။
အဆင့် 5. [Save to File] dataloging configuration window ကိုဖွင့်ရန်။ အာရုံခံကိရိယာကို ရွေးချယ်ပြီး တွက်ချက်မှုဒေတာကို ထည့်သွင်းပါ။ file. သက်ဆိုင်ရာ ခလုတ်ကို နှိပ်ခြင်းဖြင့် သိမ်းဆည်းခြင်းကို စတင်နိုင်သည် သို့မဟုတ် ရပ်နိုင်သည်။
အဆင့် 6. ဒေတာထိုးသွင်းမုဒ်ကို အသုံးပြုပြီး ယခင်ရရှိထားသောဒေတာကို စာကြည့်တိုက်သို့ ပေးပို့ပြီး ရလဒ်ကို လက်ခံရယူရန်။ သီးသန့်ကိုဖွင့်ရန် ဒေါင်လိုက်တူးလ်ဘားပေါ်ရှိ [ဒေတာထိုးသွင်းခြင်း] တက်ဘ်ကို ရွေးပါ။ view ဤလုပ်ဆောင်ချက်အတွက်
အဆင့် 7. ကိုရွေးချယ်ရန် [Browse] ခလုတ်ကိုနှိပ်ပါ။ file CSV ဖော်မတ်ဖြင့် ယခင်ဖမ်းယူထားသော ဒေတာနှင့်အတူ။ ဒေတာကို လက်ရှိဇယားတွင် တင်ပါမည်။ view.
အခြားခလုတ်များသည် အသက်ဝင်မည်ဖြစ်သည်။ နှိပ်နိုင်သည်-
- [အော့ဖ်လိုင်းမုဒ်] ဖမ်ဝဲအော့ဖ်လိုင်းမုဒ်ကို အဖွင့်/ပိတ်ပြောင်းရန် ခလုတ် (ယခင်ကဖမ်းယူထားသောဒေတာကိုအသုံးပြုသည့်မုဒ်)။
- [Start]/[Stop]/[Step]/[Repeat] MEMS-Studio မှ ဒေတာဖိဒ်ကို စာကြည့်တိုက်သို့ ထိန်းချုပ်ရန် ခလုတ်များ
ကိုးကား
အောက်ပါအရင်းအမြစ်များအားလုံးကို www.st.com တွင် လွတ်လပ်စွာ ရနိုင်ပါသည်။
- UM1859- STM1Cube အတွက် X-CUBE-MEMS32 ရွေ့လျားမှု MEMS နှင့် ပတ်ဝန်းကျင်အာရုံခံကိရိယာဆော့ဖ်ဝဲချဲ့ထွင်ခြင်းဖြင့် စတင်ခြင်း
- UM1724- STM32 Nucleo-64 ဘုတ်များ (MB1136)
- UM3233- MEMS-Studio ဖြင့် စတင်ခြင်း။
ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း
ဇယား ၁။ စာရွက်စာတမ်း ပြန်လည်ပြင်ဆင်မှုမှတ်တမ်း

အရေးကြီးသတိပေးချက် - ဂရုတစိုက်ဖတ်ပါ။
STMicroelectronics NV နှင့် ၎င်း၏လုပ်ငန်းခွဲများ (“ST”) သည် ST ထုတ်ကုန်များနှင့်/သို့မဟုတ် ဤစာရွက်စာတမ်းအား အသိပေးခြင်းမရှိဘဲ အပြောင်းအလဲများ၊ ပြုပြင်မှုများ၊ မြှင့်တင်မှုများ၊ ပြုပြင်မွမ်းမံမှုများနှင့် တိုးတက်မှုများကို အချိန်မရွေးပြုလုပ်ရန် လက်ဝယ်ရှိသည်။ အမှာစာမတင်မီ ဝယ်ယူသူများသည် ST ထုတ်ကုန်များဆိုင်ရာ နောက်ဆုံးရသက်ဆိုင်ရာအချက်အလက်များကို ရယူသင့်သည်။ ST ထုတ်ကုန်များကို အမှာစာလက်ခံသည့်အချိန်တွင် ST ၏ရောင်းချမှုစည်းကမ်းချက်များနှင့်အညီ ရောင်းချပါသည်။ ဝယ်ယူသူများသည် ST ထုတ်ကုန်များ၏ ရွေးချယ်မှု၊ ရွေးချယ်မှုနှင့် အသုံးပြုမှုအတွက် တစ်ခုတည်းတွင် တာဝန်ရှိပြီး ST သည် လျှောက်လွှာအကူအညီ သို့မဟုတ် ဝယ်ယူသူများ၏ ထုတ်ကုန်ဒီဇိုင်းအတွက် တာဝန်မရှိဟု ယူဆပါသည်။ ဤနေရာတွင် ST မှ ပေးအပ်သည့် မည်သည့်ဉာဏပစ္စည်းမူပိုင်ခွင့်ကိုမဆို လိုင်စင်၊ ဖော်ပြခြင်း သို့မဟုတ် အဓိပ္ပာယ်ဖွင့်ဆိုထားခြင်းမရှိပါ။ ဤနေရာတွင်ဖော်ပြထားသော အချက်အလက်များနှင့် ကွဲပြားသော ပြဋ္ဌာန်းချက်များရှိသော ST ထုတ်ကုန်များကို ပြန်လည်ရောင်းချခြင်းသည် ထိုထုတ်ကုန်အတွက် ST မှပေးသော အာမခံတစ်စုံတစ်ရာကို ပျက်ပြယ်စေမည်ဖြစ်သည်။ ST နှင့် ST လိုဂိုများသည် ST ၏ ကုန်အမှတ်တံဆိပ်များဖြစ်သည်။ ST အမှတ်တံဆိပ်များအကြောင်း နောက်ထပ်အချက်အလက်များအတွက် www.st.com/trademarks တွင် ဖတ်ရှုပါ။ အခြားထုတ်ကုန် သို့မဟုတ် ဝန်ဆောင်မှုအမည်များအားလုံးသည် ၎င်းတို့၏ သက်ဆိုင်ရာပိုင်ရှင်များ၏ ပိုင်ဆိုင်မှုဖြစ်သည်။ ဤစာရွက်စာတမ်းရှိ အချက်အလက်ကို အစားထိုးပြီး ဤစာရွက်စာတမ်း၏ ယခင်ဗားရှင်းတစ်ခုခုတွင် ယခင်က ပေးခဲ့သည့် အချက်အလက်များကို အစားထိုးသည်။ © 2024 STMicroelectronics - အခွင့်အရေးအားလုံးကို လက်ဝယ်ရှိသည်။
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
ST Microelectronics NUCLEO-F401RE အချိန်နှင့်တပြေးညီ Pose ခန့်မှန်းချက်စာကြည့်တိုက် [pdf] အသုံးပြုသူလမ်းညွှန် NUCLEO-F401RE၊ NUCLEO-U575ZI-Q၊ NUCLEO-L152RE၊ NUCLEO-F401RE Real Time Pose Estimation Library၊ NUCLEO-F401RE၊ Real Time Pose Estimation Library၊ Time Pose Estimation Library၊ Pose Estimation Library၊ Library |



