ROBOWORKS N10 စက်ရုပ် ပညာရေးဆိုင်ရာ ပရိုဂရမ်သုံးနိုင်သော မိုဘိုင်းစက်ရုပ်

သတ်မှတ်ချက်များ
| ထုတ်ကုန်အမည် | မော်တာလျှော့ချရေးအချိုး | အမြင့်ဆုံးမြန်နှုန်း | အလေးချိန် | အများဆုံးပေးချေမှု | အရွယ်အစား | အနိမ့်ဆုံး အကွေ့အချင်းဝက် |
|---|---|---|---|---|---|---|
| စက်ရုပ် ၂ | ၁၁:၄၂ | 1.3m/s | 5.92 ကီလိုဂရမ် | 16 ကီလိုဂရမ် | 445*360*206mm | 0.77m |
| Rosbot Pro | ၁၁:၄၂ | 1.65m/s | 19.54 ကီလိုဂရမ် | 35 ကီလိုဂရမ် | 774*570*227mm | 1.02m |
| Rosbot Plus | ၁၁:၄၂ | 2.33m/s | 35.16 ကီလိုဂရမ် | 22 ကီလိုဂရမ် | 766*671*319mm | 1.29m |
ဘက်ထရီသက်တမ်းနှင့် ပါဝါထောက်ပံ့မှု-
- စက်ရုပ် 2- 9.5 နာရီခန့် (ဝန်မရှိ)၊ 8.5 နာရီခန့် (အပြည့်သွင်းနိုင်သည်)
- စက်ရုပ် Pro- 4.5 နာရီခန့် (ဝန်မရှိပါ)၊ 3 နာရီခန့် (အပြည့်သွင်းနိုင်သည်)
- ပါဝါထောက်ပံ့မှု- 24v 6000 mAh ဘက်ထရီ + 3A လက်ရှိ စမတ်အားသွင်းကိရိယာ
စတီယာရင်နှင့် မောင်းနှင်စနစ်-
အဓိက အစိတ်အပိုင်းများ ပါဝင်သည်-
- စတီယာရင်ဂီယာ- S20F 20kg torque ဒစ်ဂျစ်တယ်ဆာဗာ
- ဘီးများ- WH060 60kg torque digital servo၊ Rosbot 125 အတွက် 2mm အချင်း ရော်ဘာဘီးများ၊ Robot Pro အတွက် 150mm အချင်းအစိုင်အခဲ ရော်ဘာဘီးများ
- ကုဒ်နံပါတ်- 500 လိုင်း AB အဆင့် မြင့်မားသောတိကျသောကုဒ်ဒါ
- Suspension စနစ်- Robot 2 အတွက် Coaxial Pendulum Suspension စနစ်၊ Robot Pro အတွက် 4W လွတ်လပ်သော ဆိုင်းထိန်းစနစ် နှင့်
- ထိန်းချုပ်မျက်နှာပြင်- Bluetooth သို့မဟုတ် Wifi၊ PS2၊ CAN၊ Serial Port၊ USB မှတဆင့် iOS နှင့် Android အက်ပ်
ROS Controllers မိတ်ဆက်-
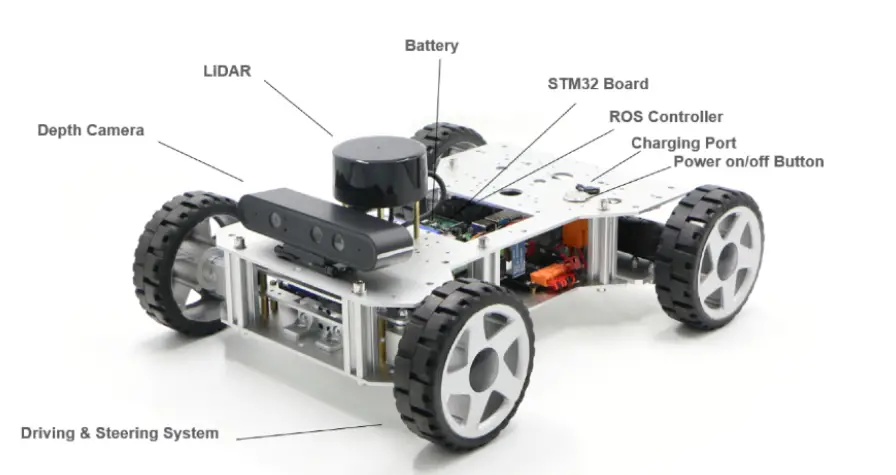
RRobotsare အားလုံးတွင် လက်ဟန်ထိန်းချုပ်မှု၊ အရိုးစုခြေရာခံခြင်းနှင့် 3D စကင်န်ဖတ်ခြင်းအပါအဝင် အမျိုးမျိုးသောအသုံးပြုမှုအတွက် Orbbec Astra Depth Camera တပ်ဆင်ထားသည်။
STM32 ဘုတ်အဖွဲ့-
ဘုတ်တွင် Memories၊ Clock၊ Reset and SupplyManagement၊ Power DMA၊ Debug Mode၊ I/O ports၊ Timers နှင့် Communication Interface အပါအဝင် အမျိုးမျိုးသော လုပ်ဆောင်ချက်များပါရှိသော STM32F103RC core ကို ဘုတ်တွင် ပါရှိသည်။
အမေးများသောမေးခွန်းများ
မေး- ဘက်ထရီကို ဘယ်လိုအားသွင်းရမလဲ။
A- RRobot အား အားသွင်းရန် 3v 24mAh ဘက်ထရီဖြင့် ပေးထားသည့် 6000A လက်ရှိ စမတ်အားသွင်းကိရိယာကို အသုံးပြုပါ။
မေး- Rosbot Pro ရဲ့ ဘက်ထရီသက်တမ်းက ဘယ်လောက်လဲ။
A- Robot Pro သည် ဝန်မပါပဲ ဘက်ထရီသက်တမ်း 4.5 နာရီ နှင့် အပြည့်သွင်းနိုင်သော အခြေအနေအောက်တွင် 3 နာရီခန့် ခံပါသည်။
မေး- စမတ်ဖုန်းဖြင့် Rosbot ကို ထိန်းချုပ်နိုင်ပါသလား။
A- ဟုတ်ကဲ့၊ Bluetooth သို့မဟုတ် Wifi မှတစ်ဆင့် iOS နှင့် Android အက်ပ်ကို အသုံးပြု၍ Rosbot ကို သင်ထိန်းချုပ်နိုင်သည်။
အဓိကအစိတ်အပိုင်း
| Varia% ဖွင့်ထားသည်။ | ပုံ |
| စက်ရုပ် ၂ |  |
| စက်ရုပ်ပရို |  |
| စက်ရုပ် Plus |  |
ကုန်ပစ္စည်းသတ်မှတ်ချက်များ
|
ထုတ်ကုန် Matrix |
 |
 |
 |
| ထုတ်ကုန်အမည် | စက်ရုပ် ၂ | စက်ရုပ်ပရို | စက်ရုပ် Plus |
| မော်တာလျှော့ချရေးအချိုး | ၁၁:၄၂ | ၁၁:၄၂ | ၁၁:၄၂ |
| အမြင့်ဆုံးမြန်နှုန်း | 1.3m/s | 1.65m/s | 2.33m/s |
| အလေးချိန် | 5.92 ကီလိုဂရမ် | 19.54 ကီလိုဂရမ် | 35.16 ကီလိုဂရမ် |
| အများဆုံးပေးချေမှု | 16 ကီလိုဂရမ် | 35 ကီလိုဂရမ် | 22 ကီလိုဂရမ် |
| အရွယ်အစား | 445*360*206mm | 774*570*227mm | 766*671*319mm |
| အနိမ့်ဆုံး အကွေ့အချင်းဝက် | 0.77m | 1.02m | 1.29m |
| ဘက်ထရီသက်တမ်း | 9.5 နာရီခန့် (ဝန်မရှိပါ) 8.5 နာရီခန့် (အပြည့်သွင်းနိုင်သည်)၊ | 4.5 နာရီခန့် (ဝန်မရှိပါ) 3 နာရီခန့် (အပြည့်သွင်းနိုင်သည်)၊ | |
| လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | 24v 6000 mAh ဘက်ထရီ + 3A လက်ရှိ စမတ်အားသွင်းကိရိယာ | ||
| စတီယာရင်ဂီယာ | S20F 20kg torque ဒစ်ဂျစ်တယ်ဆာဗာ | WH060 60kg torque ဒစ်ဂျစ်တယ်ဆာဗာ | |
| ဘီး | အချင်း 125 မီလီမီတာ အစိုင်အခဲရော်ဘာဘီးများ | အချင်း 150 မီလီမီတာ အစိုင်အခဲရော်ဘာဘီးများ | 254 မီလီမီတာ ဖောင်းနေသော ရော်ဘာဘီးများ |
| ကုဒ်ကိရိယာ | 500 လိုင်း AB အဆင့် မြင့်မားသောတိကျသောကုဒ်ဒါ | ||
| Suspension စနစ် | Coaxial Pendulum Suspension စနစ် | 4W Independent Suspension စနစ် | |
| ထိန်းချုပ်မှု အင်တာဖေ့စ် | Bluetooth သို့မဟုတ် Wifi၊ PS2၊ CAN၊ Serial Port၊ USB မှတဆင့် iOS နှင့် Android အက်ပ် | ||
ROS Controllers မိတ်ဆက်
Vidia Jetson ပလပ်ဖောင်းပေါ်အခြေခံ၍ RRobot နှင့်အသုံးပြုရန်အတွက်ရရှိနိုင်သော ROS Controller အမျိုးအစား 2 ခုရှိသည်။ Jetson Orin Nano သည် သုတေသနနှင့် ပညာရေးအတွက် ပိုမိုသင့်လျော်ပါသည်။ Jetson Orin NX သည် ထုတ်ကုန်ပုံတူပုံစံဖော်ခြင်းနှင့် စီးပွားဖြစ်အသုံးချပရိုဂရမ်များအတွက် စံပြဖြစ်သည်။ အောက်ဖော်ပြပါဇယားသည် Roboworks မှရရှိနိုင်သည့် ထိန်းချုပ်ကိရိယာအမျိုးမျိုးကြားရှိ အဓိကနည်းပညာဆိုင်ရာ ကွဲပြားမှုများကို ဖော်ပြသည်။ ဘုတ်နှစ်ခုစလုံးသည် မြင့်မားသောအဆင့်တွက်ချက်မှုကို ခွင့်ပြုထားပြီး ကွန်ပျူတာအမြင်၊ နက်နဲသောသင်ယူမှုနှင့် ရွေ့လျားမှုအစီအစဉ်များကဲ့သို့သော အဆင့်မြင့်စက်ရုပ်အပလီကေးရှင်းများအတွက် သင့်လျော်ပါသည်။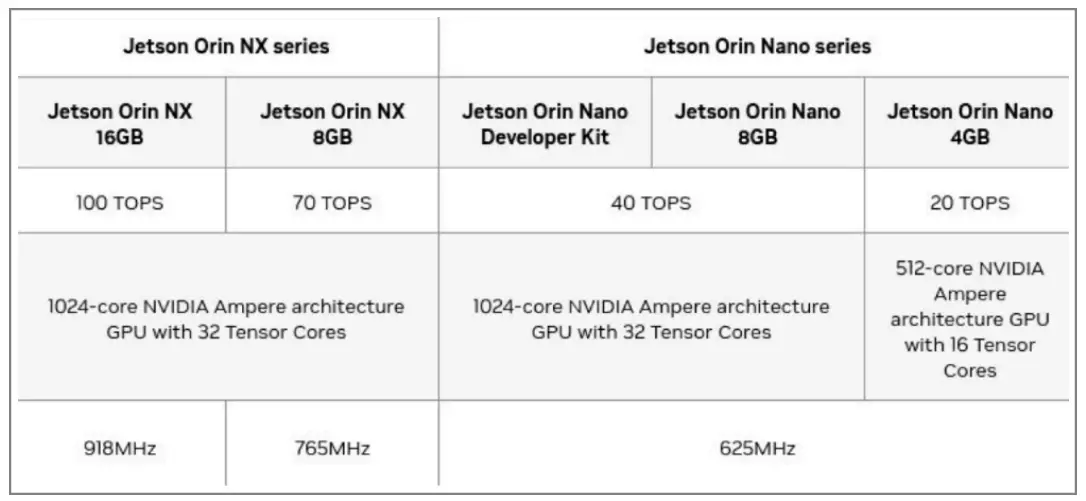
အာရုံခံစနစ်- LiDAR နှင့် အတိမ်အနက် ကင်မရာ
Leishen LSLiDAR ကို N10 သို့မဟုတ် M10 မော်ဒယ်နှစ်မျိုးလုံးတွင် အသုံးပြုထားသည့် Rosbot ဗားရှင်းအားလုံးတွင် ထည့်သွင်းထားသည်။ ဤ LLiDAR များသည် 3360-3360 ဒီဂရီစကင်န်ဖတ်ခြင်းနှင့် ပတ်ဝန်ကျင်ရှိ အမြင်အာရုံတို့ကို ပေးစွမ်းနိုင်ပြီး ကျစ်လစ်ပြီး ပေါ့ပါးသော ESI ကို ဂုဏ်ယူပါသည်။ ၎င်းတို့တွင် မြင့်မားသော Signal Noise Ratio ရှိပြီး မြင့်မားသော/နိမ့်သော အလင်းပြန်သည့် အရာများပေါ်တွင် ကောင်းမွန်စွာ ထောက်လှမ်းနိုင်ကာ အားကောင်းသော အလင်းရောင်အခြေအနေများတွင် ကောင်းမွန်စွာ လုပ်ဆောင်နိုင်သည်။ ၎င်းတို့တွင် ထောက်လှမ်းနိုင်သည့် အကွာအဝေး 30 မီတာနှင့် စကင်န်ကြိမ်နှုန်း 12Hz ရှိသည်။ ဤ LiDAR သည် စက်ရုပ်များနှင့် ချောမွေ့စွာ ပေါင်းစပ်ထားသောကြောင့် သင့်ပရောဂျက်တွင် မြေပုံဆွဲခြင်းနှင့် လမ်းပြအသုံးပြုမှုအားလုံးကို လွယ်ကူစွာ ဆောင်ရွက်နိုင်ကြောင်း သေချာစေပါသည်။ အောက်ဖော်ပြပါဇယားသည် sliders များ၏နည်းပညာပိုင်းဆိုင်ရာသတ်မှတ်ချက်များကိုအကျဉ်းချုပ်ဖော်ပြသည်-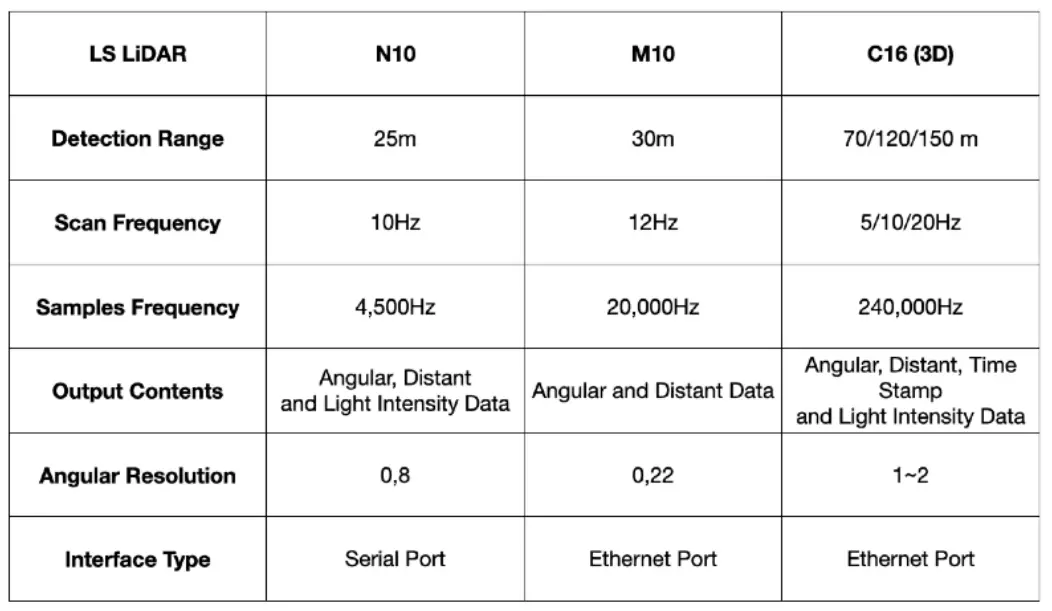
ထို့အပြင်၊ စက်ရုပ်အားလုံးတွင် RGBD ကင်မရာဖြစ်သည့် Orbbec Astra Depth Camera တပ်ဆင်ထားသည်။ ဤကင်မရာကို လက်ဟန်ခြေဟန်ထိန်းချုပ်မှု၊ အရိုးစုခြေရာခံခြင်း၊ 3D စကင်န်ဖတ်ခြင်းနှင့် point cloud ဖွံ့ဖြိုးတိုးတက်မှုတို့အပါအဝင် အသုံးပြုမှုအမျိုးမျိုးအတွက် အကောင်းဆုံးလုပ်ဆောင်ထားပါသည်။ အောက်ပါဇယားသည် depth camera ၏နည်းပညာပိုင်းဆိုင်ရာအင်္ဂါရပ်များကို အကျဉ်းချုပ်ဖော်ပြသည်။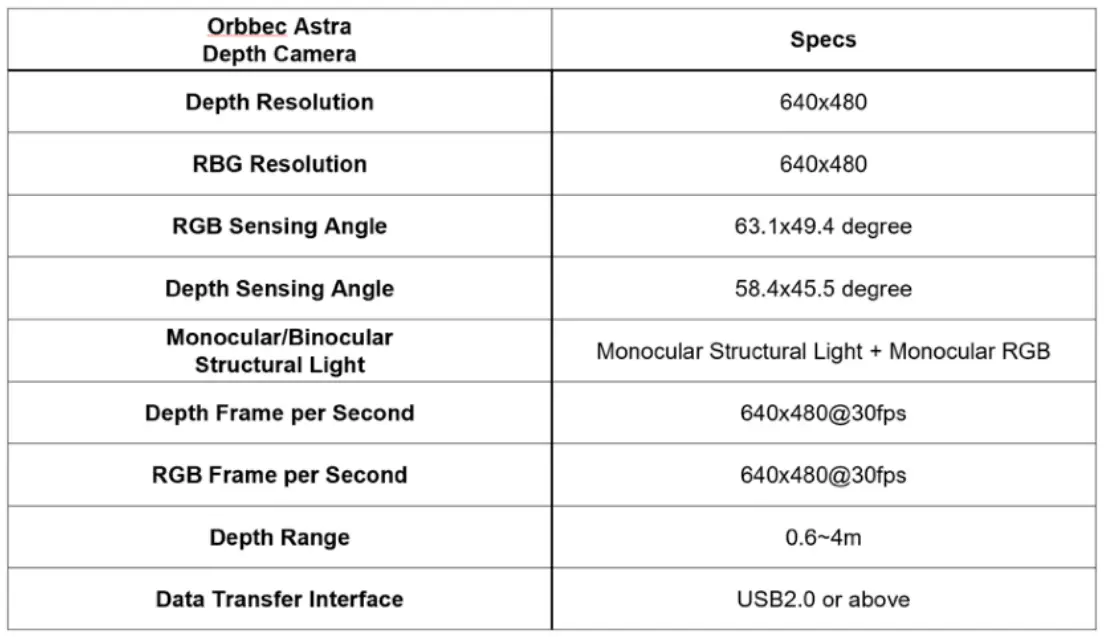
STM32 ဘုတ်အဖွဲ့ (မော်တာထိန်းချုပ်မှု၊ ပါဝါစီမံခန့်ခွဲမှုနှင့် IMU)
STM32F103RC Board သည် Rosbots အားလုံးတွင်အသုံးပြုသော microcontroller ဖြစ်သည်။ ၎င်းတွင် 3MHz ကြိမ်နှုန်းဖြင့် လုပ်ဆောင်နေသော စွမ်းဆောင်ရည်မြင့် ARM Cortex-M32 72-bit RISC core ပါရှိသည်။ ၎င်းသည် -40°C မှ +105°C အပူချိန်အကွာအဝေးအတွင်း လည်ပတ်နိုင်ပြီး ကမ္ဘာတစ်ဝှမ်းရှိ ရာသီဥတုတွင် စက်ရုပ်အပလီကေးရှင်းများအားလုံးနှင့် ကိုက်ညီပါသည်။ ပါဝါချွေတာသောမုဒ်များ ပါဝါနည်းသော အပလီကေးရှင်းများ၏ ဒီဇိုင်းကို ခွင့်ပြုသည်။ ဤမိုက်ခရိုကွန်ထရိုလာ၏ အပလီကေးရှင်းအချို့တွင် မော်တာဒရိုက်များ၊ အပလီကေးရှင်းထိန်းချုပ်မှု၊ စက်ရုပ်အပလီကေးရှင်းများ ဆေးဘက်ဆိုင်ရာနှင့် လက်ကိုင်ကိရိယာများ၊ PC နှင့် ဂိမ်းအရံအတားများ၊ GPS ပလပ်ဖောင်းများ၊ စက်မှုအက်ပ်လီကေးရှင်းများ၊ အချက်ပေးစနစ် ဗီဒီယို intercom နှင့် စကင်နာများ ပါဝင်သည်။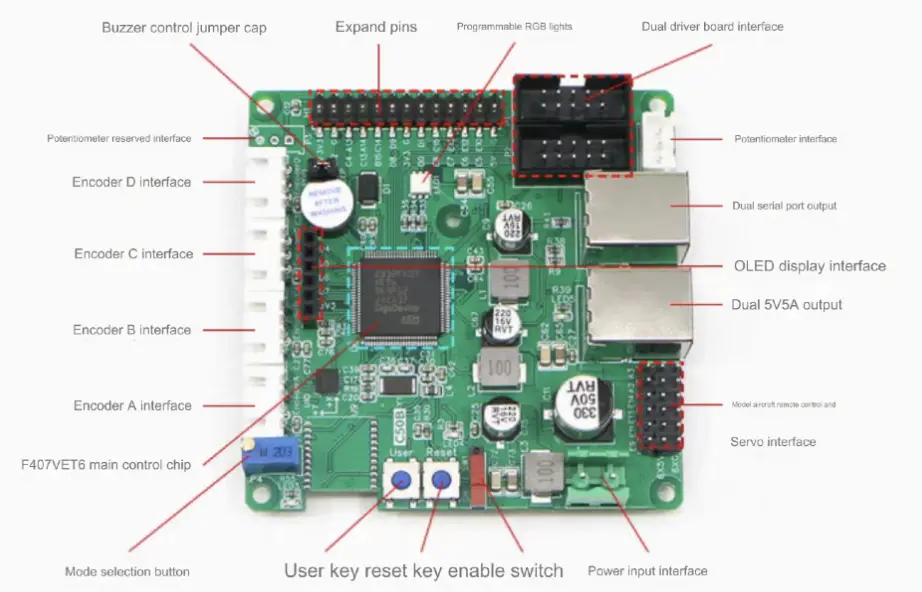
| STM32F103RC | အင်္ဂါရပ်များ |
| အူတိုင် | ARM32-bit Cortex –M3 CPU သည် အမြင့်ဆုံးအမြန်နှုန်း 72 MHz ဖြစ်သည်။ |
| အမှတ်တရများ | 512 KB Flash memory 64kB SRAM |
| နာရီ၊ ပြန်လည်သတ်မှတ်ခြင်းနှင့် ထောက်ပံ့ရေးစီမံခန့်ခွဲမှု | 2.0 မှ 3.6 V အပလီကေးရှင်း ထောက်ပံ့မှုနှင့် I/Os |
|
ပါဝါ |
အိပ်စက်ခြင်း၊ ရပ်တန့်ခြင်းနှင့် အသင့်အနေအထားမုဒ်များ
RTC နှင့် အရန်စာရင်းများအတွက် V ထောက်ပံ့သည်။ BAT |
| DMA | 12-channel DMA Controller |
| အမှားရှာမုဒ် | SWD နှင့် JTAG Cortex-M3 Embedded Trace Macrocell ၏ အင်တာဖေ့စ် |
| I/O အပေါက်များ | 51 I/O အပေါက်များ (ပြင်ပနှောက်ယှက်သည့် vector 16 ခုနှင့် 5V ခံနိုင်ရည်ရှိသော) |
|
တိုင်မာများ |
4×16-ဘစ်တိုင်မာများ
2 x 16-bit မော်တာထိန်းချုပ်မှု PWM တိုင်မာများ (အရေးပေါ်ရပ်တန့်ခြင်းနှင့်အတူ) 2 x စောင့်ကြည့်ချိန်စက်များ (အမှီအခိုကင်းပြီး Window) SysTick အချိန်တိုင်းကိရိယာ (24-bit down counter) DAC ကိုမောင်းနှင်ရန် 2 x 16-bit အခြေခံအချိန်တိုင်းကိရိယာများ |
|
ဆက်သွယ်ရေးအင်တာဖေ့စ် |
USB 2.0 မြန်နှုန်းပြည့် အင်တာဖေ့စ် SDIO အင်တာဖေ့စ်
အင်တာဖေ့စ်လုပ်နိုင်သည် (2.0B Active) |
စတီယာရင်နှင့် မောင်းနှင်မှုစနစ်
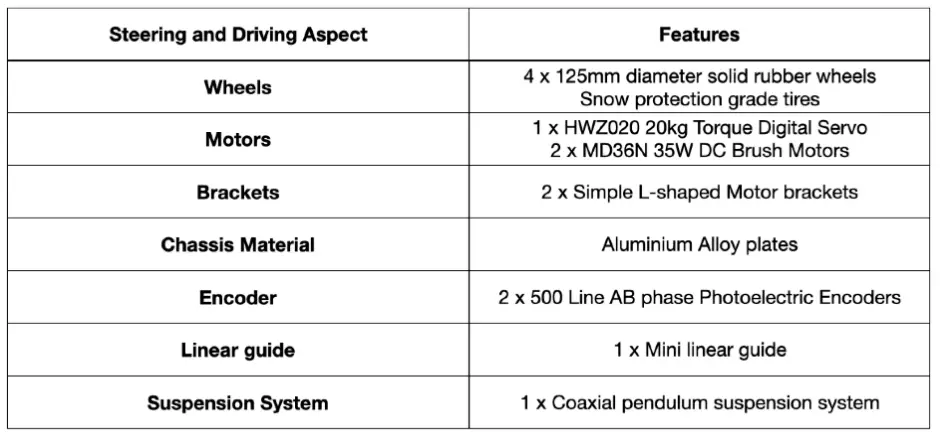
Steering and Driving စနစ်သည် စက်ရုပ်၏ ဒီဇိုင်းနှင့် တည်ဆောက်မှုဖြင့် ပေါင်းစပ်ထားသည်။ ဝယ်ယူသည့် မော်ဒယ်ပေါ် မူတည်၍ ၎င်းသည် 2 ဘီး သို့မဟုတ် 4 ဘီးယက် ဖြစ်ကာ ရွေးချယ်စရာ နှစ်ခုစလုံးသည် သုတေသနနှင့် ဖွံ့ဖြိုးတိုးတက်ရေး ရည်ရွယ်ချက် အမျိုးမျိုးအတွက် သင့်လျော်ပါသည်။ စက်ရုပ်အားလုံးရှိ ဘီးများသည် နှင်းဒဏ်ခံနိုင်သော တာယာများပါသည့် အစိုင်အခဲရော်ဘာများဖြစ်သည်။ coaxial pendulum suspension စနစ်ပါရှိပြီး စက်ရုပ်များသည် ခက်ခဲသောမြေမျက်နှာသွင်ပြင်သို့ အောင်မြင်စွာသွားလာနိုင်စေရေးအတွက် သီးခြားလွတ်လပ်သောဆိုင်းထိန်းစနစ်များပါရှိသော ရှော့ခ်စုပ်ကိရိယာများ တပ်ဆင်ထားပါသည်။
စတီယာရင်နှင့် မောင်းနှင်မှုဆိုင်ရာ နည်းပညာဆိုင်ရာ သတ်မှတ်ချက်များ-
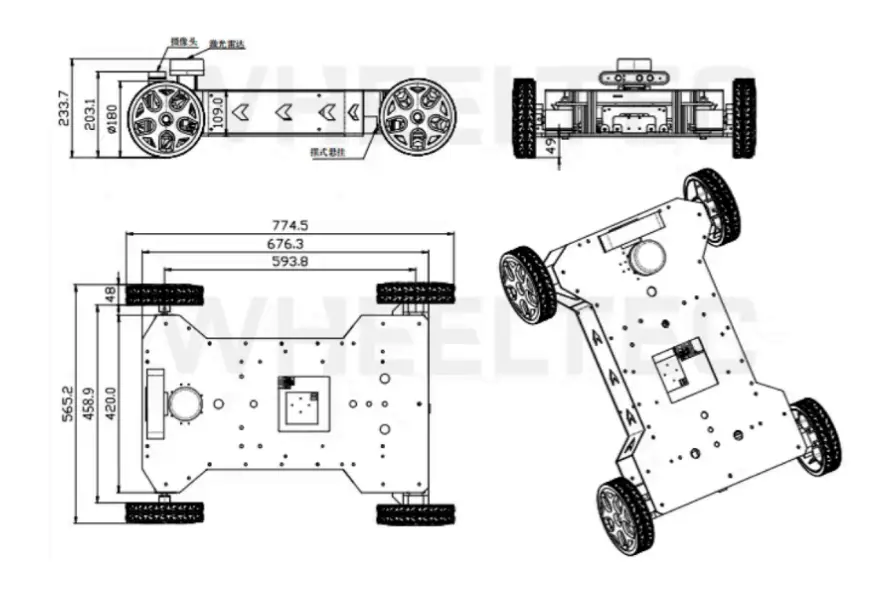
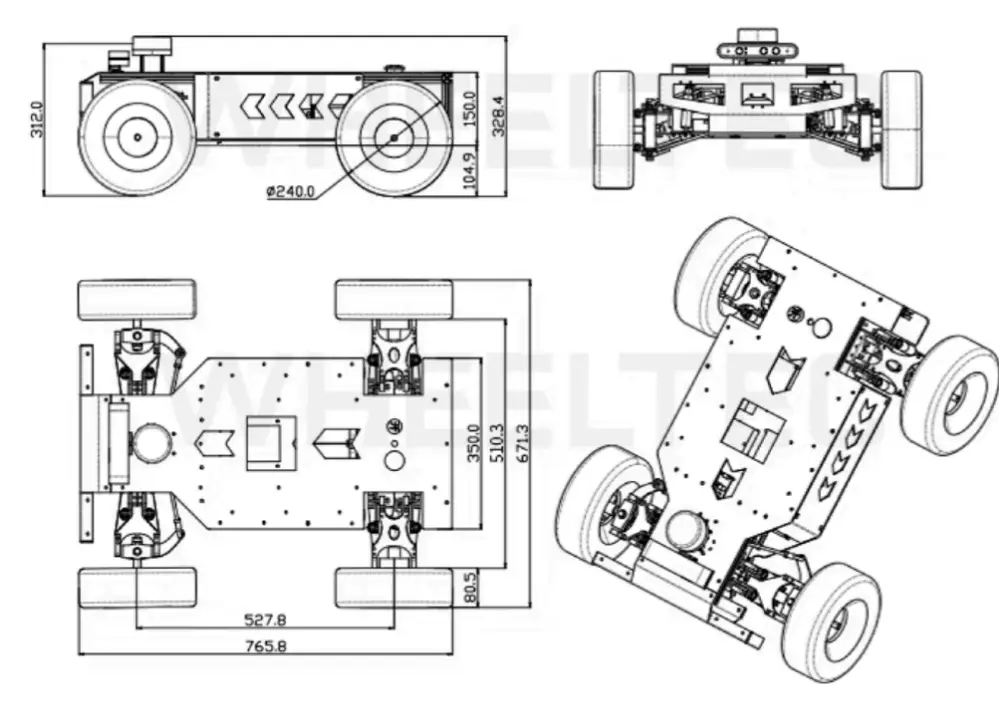
စက်ရုပ်ကိုယ်ထည် ဒီဇိုင်းပုံကြမ်း-
စက်ရုပ် ၂

စက်ရုပ်ပရို
စက်ရုပ် Plus
ပါဝါစီမံခန့်ခွဲမှု
Power Mag - သံလိုက် LFP ဘက်ထရီ
Rosbots အားလုံးတွင် 6000 mAh Power Mag၊ သံလိုက် LFP (Lithium Iron Phosphate) ဘက်ထရီနှင့် Power Charger တို့ပါရှိသည်။ သုံးစွဲသူများသည် အပိုကုန်ကျစရိတ်ဖြင့် ဘက်ထရီ 20000 mAh သို့ အဆင့်မြှင့်နိုင်သည်။ LFP ဘက်ထရီများသည် ၎င်းတို့၏ တည်ငြိမ်မှု၊ ဘေးကင်းမှု၊ နှင့် တာရှည်လည်ပတ်မှုသက်တမ်းအတွက် လူသိများသော လစ်သီယမ်-အိုင်းယွန်း ဘက်ထရီ အမျိုးအစားတစ်ခုဖြစ်သည်။ ကိုဘော့ သို့မဟုတ် နီကယ်ကိုသုံးသည့် ရိုးရာလစ်သီယမ်-အိုင်းယွန်းဘက်ထရီများနှင့် မတူဘဲ၊ LFP ဘက်ထရီများသည် သံဖော့စဖိတ်ကို အားကိုးသဖြင့် ပိုမိုရေရှည်တည်တံ့ပြီး အဆိပ်သင့်မှုနည်းသော အခြားရွေးချယ်စရာကို ပေးဆောင်သည်။ ၎င်းတို့သည် အပူလွန်ကဲမှုနှင့် မီးလောင်ကျွမ်းမှုအန္တရာယ်ကို လျှော့ချပေးသည်။ ၎င်းတို့တွင် အခြား လီသီယမ်-အိုင်းယွန်း ဘက်ထရီများနှင့် နှိုင်းယှဉ်ပါက စွမ်းအင်သိပ်သည်းဆ နည်းပါးသော်လည်း၊ LFP ဘက်ထရီများသည် တာရှည်ခံမှု၊ တာရှည်ခံမှု၊ ပိုမိုမြန်ဆန်စွာ အားသွင်းခြင်းနှင့် အပူချိန်လွန်ကဲသော အပူချိန်များတွင် စွမ်းဆောင်ရည် ပိုမိုကောင်းမွန်သောကြောင့် ၎င်းတို့အား လျှပ်စစ်ကားများ (EV) နှင့် စွမ်းအင်သိုလှောင်မှုစနစ်များအတွက် စံပြဖြစ်စေပါသည်။ Power Mag သည် စက်ရုပ်၏ သံလိုက်အခြေခံ ဒီဇိုင်းကြောင့် စက်ရုပ်၏ မည်သည့်သတ္တုမျက်နှာပြင်နှင့်မဆို တွဲနိုင်သည်။ ၎င်းသည် ဘက်ထရီလဲလှယ်ခြင်းကို မြန်ဆန်လွယ်ကူစေသည်။
နည်းပညာဆိုင်ရာ သတ်မှတ်ချက်များ-
| မော်ဒယ် | 6000 mAh | 20000 mAh |
| ဘက်ထရီအထုပ် |
22.4V 6000mAh |
22.4V 20000mAh |
|
အမာခံပစ္စည်း |
လီသီယမ်သံဖော့စဖိတ် |
လီသီယမ်သံဖော့စဖိတ် |
| Cutoff Voltage | 16.5 V | 16.5 V |
|
Voltage |
25.55 V |
25.55 V |
| အားသွင်းရေစီးကြောင်း | 3A | 3A |
| Shell Material ၊ |
သတ္တု |
သတ္တု |
| Discharge Performance | 15A ဆက်တိုက်ထုတ်လွှတ်ခြင်း။ | 20A ဆက်တိုက်ထုတ်လွှတ်ခြင်း။ |
|
ပလပ် |
DC4017MM အမျိုးသမီးချိတ်ဆက်ကိရိယာ (အားသွင်းခြင်း) XT60U-F အမျိုးသမီးချိတ်ဆက်ကိရိယာ (အားသွင်းခြင်း) |
DC4017MM အမျိုးသမီးချိတ်ဆက်ကိရိယာ (အားသွင်းခြင်း) XT60U-F အမျိုးသမီးချိတ်ဆက်ကိရိယာ (အားသွင်းခြင်း) |
|
အရွယ်အစား |
177*146*42mm |
208*154*97mm |
|
အလေးချိန် |
1.72 ကီလိုဂရမ် |
4.1 ကီလိုဂရမ် |
ဘက်ထရီကာကွယ်ရေး
ဝါယာရှော့များ၊ လျှပ်စီးကြောင်းများ၊ အားပိုဝင်ခြင်း၊ လျှပ်စီးထွက်လွန်ခြင်းကို အကာအကွယ်ပေးခြင်း၊ အသုံးပြုနေစဉ် အားသွင်းခြင်းကို ပံ့ပိုးပေးခြင်း၊ တပ်ဆင်ထားသော ဘေးကင်းရေး အဆို့ရှင်၊ မီးမတောက်ခြင်းဘုတ်ပြား။
အလိုအလျောက် အားသွင်းစခန်း (ပါဝါ+)-
အော်တိုအားသွင်းစခန်းကို Rosbot 2+ မော်ဒယ်ဖြင့် ထုပ်ပိုးထားပြီး Rosbot 2၊ Rosbot Pro နှင့် Rosbot Plus တို့နှင့် တွဲဖက်လုပ်ဆောင်ရန် သီးခြားဝယ်ယူနိုင်ပါသည်။
ROS 2 အမြန်စတင်ပါ။
စက်ရုပ်ကို ပထမဆုံး ပါဝါဖွင့်သောအခါ၊ ၎င်းအား မူရင်းအတိုင်း ROS မှ ထိန်းချုပ်ထားသည်။ အဓိပ္ပါယ်မှာ၊ STM32 ကိုယ်ထည်ထိန်းချုပ်မှုဘုတ်အဖွဲ့သည် ROS 2 Controller – The Jetson Orin ထံမှ ညွှန်ကြားချက်များကို လက်ခံပါသည်။ ကနဦးထည့်သွင်းမှုသည် မြန်ဆန်လွယ်ကူသည်၊ သင်၏အိမ်ရှင် PC (Ubuntu Linux မှအကြံပြုထားသည်) စက်ရုပ်၏ Wi-Fi ဟော့စပေါ့သို့ ချိတ်ဆက်ပါ။ မူရင်းစကားဝှက်မှာ "Dongguan" ဖြစ်သည်။ ထို့နောက်၊ Linuxterminatee l မှတစ်ဆင့် SSH ကို အသုံးပြု၍ စက်ရုပ်သို့ ချိတ်ဆက်ပါ၊ P လိပ်စာမှာ 192.168.0.10 နှင့် 0 ဖြစ်ပြီး မူရင်းစကားဝှက်မှာ Dongguan ဖြစ်သည်။
စက်ရုပ်သို့ terminal ဝင်ရောက်ခြင်းဖြင့်၊ "wheeltec_ROS 2" အောက်တွင် "wheeltec_ROS 2" အောက်ရှိ ROS 2 workspace ဖိုဒါသို့ သွားလာနိုင်ပြီး စမ်းသပ်မှုပရိုဂရမ်များကို မလုပ်ဆောင်မီ wheeltec_ROS 2/turn_on_wheeltec_robot/ သို့သွား၍ wheeltec_udev.sh ကိုရှာပါ – ဤစခရစ်ကို ပုံမှန်အားဖြင့် တစ်ကြိမ်သာ လုပ်ဆောင်ရပါမည်။ peripherals များ၏ မှန်ကန်သောပုံစံကို သေချာပါစေ။ ယခု သင်သည် စက်ရုပ်၏ လုပ်ဆောင်နိုင်စွမ်းကို စမ်းသပ်နိုင်ပြီ၊ ROS XNUMX ထိန်းချုပ်ကိရိယာ လုပ်ဆောင်ချက်ကို စတင်ရန်- “ပြန်ဖွင့်ပါ turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
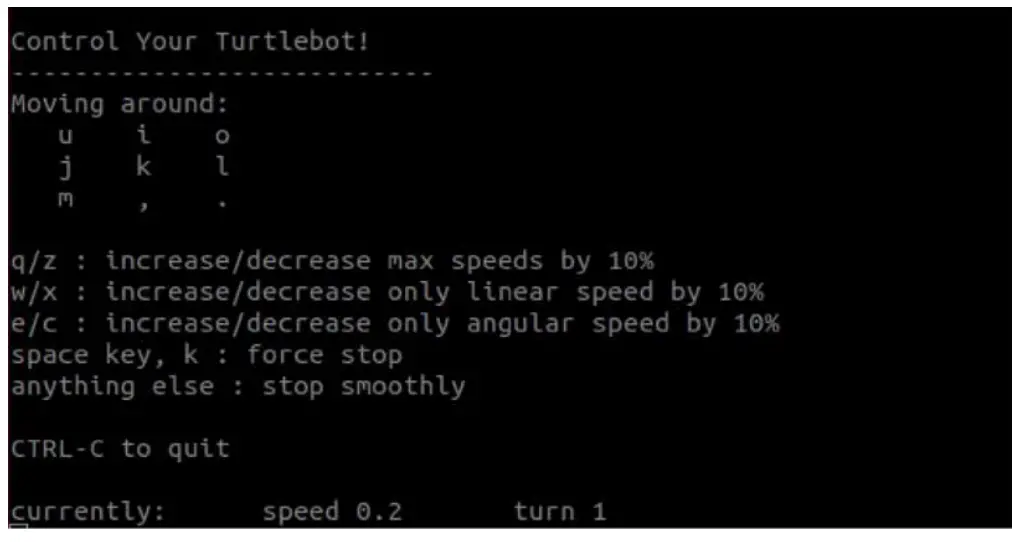
ဒုတိယ terminal တွင်၊ သင်သည် ကိုယ်ထည်ထိန်းချုပ်မှုကို တရားဝင်အောင်ပြုလုပ်ရန် keyboard_teleop node ကိုသုံးနိုင်သည်၊ ၎င်းသည် လူကြိုက်များသော ROS 2 Turtlebot ex ၏မွမ်းမံထားသောဗားရှင်းဖြစ်သည်။ampလဲ့ အမျိုးအစား- “ပြန်ဖွင့် wheeltec_robot_rc keyboard_teleop.launch”
ကြိုတင်ထည့်သွင်းထားသော ROS 2 Humble Packages
အောက်တွင်ဖော်ပြထားသောအသုံးပြုသူဦးတည်သောပက်ကေ့ဂျ်များဖြစ်ပြီး၊ အခြားသောပက်ကေ့ဂျ်များရှိနေနိုင်သော်လည်း ၎င်းတို့သည် မှီခိုမှုသာဖြစ်သည်။
- turn_on_wheeltec_robot
စက်ရုပ်၏လုပ်ဆောင်နိုင်စွမ်းနှင့် chassis controller နှင့် ဆက်သွယ်မှုအတွက် ဤပက်ကေ့ချ်သည် အရေးကြီးပါသည်။ ROS 2 နှင့် cthe controller ကို configure လုပ်ရန် boot တစ်ခုစီတွင် အဓိက script "turn_on_wheeltec_robot.launch" ကို အသုံးပြုရပါမည်။ - wheeltec_rviz2
လွှင့်တင်ခြင်းပါရှိသည်။ filePickerbot Pro အတွက် စိတ်ကြိုက်ဖွဲ့စည်းမှုဖြင့် viz ကို စတင်ရန်။ - wheeltec_robot_slam
Pickerbot Pro အတွက် စိတ်ကြိုက်ဖွဲ့စည်းမှုဖြင့် SLAM မြေပုံဆွဲခြင်းနှင့် ဒေသသတ်မှတ်ခြင်း ပက်ကေ့ဂျ်။ - wheeltec_robot_rrt၂
ကျပန်းသစ်ပင် အယ်လဂိုရီသမ်ကို လျင်မြန်စွာ စူးစမ်းရှာဖွေခြင်း - ဤပက်ကေ့ချ်သည် Pickerbot Pro အား စူးစမ်းလေ့လာရေး ဆုံမှတ်များကို စတင်ခြင်းဖြင့် ၎င်း၏အလိုရှိသော တည်နေရာသို့ လမ်းကြောင်းတစ်ခု စီစဉ်နိုင်စေပါသည်။ - wheeltec_robot_keyboard
စက်ရုပ်လုပ်ဆောင်နိုင်စွမ်းကို တရားဝင်အတည်ပြုရန်နှင့် အဝေးထိန်းအိမ်ရှင် PC အပါအဝင် ကီးဘုတ်ကိုအသုံးပြု၍ ထိန်းချုပ်ရန်အတွက် အဆင်ပြေသောအထုပ်။ - wheeltec_robot_nav2
ROS 2 Navigation 2 node အထုပ်။ - wheeltec_lidar_ros2
Leishen M2/N10 ကို ပြင်ဆင်သတ်မှတ်ခြင်းအတွက် ROS 10 Lidar ပက်ကေ့ဂျ်။ - wheeltec_joy
Joystick ထိန်းချုပ်မှု ပက်ကေ့ချ်တွင် စတင်ခြင်းပါရှိသည်။ fileJoystick node အတွက် s။ - simple_follower_ros ၂
လေဆာစကင်န် သို့မဟုတ် အတိမ်အနက်ကင်မရာကို အသုံးပြု၍ အယ်လဂိုရီသမ်များအောက်ရှိ အခြေခံအရာဝတ္ထုနှင့် မျဉ်းကြောင်း။ - ros2_astra_camera
ယာဉ်မောင်းများနှင့်အတူ Astra depth ကင်မရာပက်ကေ့ချ် files.
အနှစ်ချုပ်
စက်ရုပ်ကို ROS (စက်ရုပ်လည်ပတ်မှုစနစ်) တီထွင်သူများ၊ ပညာပေးသူများနှင့် ကျောင်းသားများအတွက် ဒီဇိုင်းရေးဆွဲထားသည်။ Rosbot ၏ နှလုံးသားသည် လူကြိုက်အများဆုံး စက်ရုပ်ပလပ်ဖောင်း - ROS ကို အခြေခံ၍ အပြည့်အဝ ပရိုဂရမ်လုပ်နိုင်သော ဆော့ဖ်ဝဲဘောင်နှင့် ပြင်ဆင်နိုင်သော ဟာ့ဒ်ဝဲဗိသုကာလက်ရာဖြစ်သည်။
စက်ရုပ်ကို အမျိုးအစားသုံးမျိုးဖြင့် ရောက်ရှိလာသည်-
- စက်ရုပ် ၂ – ROS စတင်သူများနှင့် ဘတ်ဂျက်နည်းသော ပရောဂျက်များအတွက် သင့်လျော်သည်။
- စက်ရုပ်ပရို- လျင်မြန်သော ပုံတူရိုက်ခြင်း သို့မဟုတ် သင်ကြားခြင်းအတွက် စွယ်စုံသုံးစနစ်လိုအပ်သော ROS developer များနှင့် ပညာတတ်များအတွက် သင့်လျော်ပါသည်။
- Rosbot Plus – ၎င်းသည် လွတ်လပ်သော Suspension စနစ်များဖြင့် Rosbot ၏ 4WD ဗားရှင်းဖြစ်သည်။ ဤအမျိုးအစားသည် စက်မှုနှင့် ကူးသန်းရောင်းဝယ်ရေး ဖွံ့ဖြိုးတိုးတက်မှုအတွက် ထည့်သွင်းစဉ်းစားရန် လုံလောက်ပါသည်။ စက်ရုပ်တွင် လူကြိုက်များသော ROS ထိန်းချုပ်ကိရိယာများ ပါရှိသည်-
- Jetson Orin Nano
- Jetson Orin NX
မှအသင့်ပြင်ဆင်ထားသည်: Wayne Liu၊ Reilly Smithers နှင့် Tara Hercz 30 စက်တင်ဘာ 2024
ဗားရှင်း #- 20240930
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
ROBOWORKS N10 စက်ရုပ် ပညာရေးဆိုင်ရာ ပရိုဂရမ်သုံးနိုင်သော မိုဘိုင်းစက်ရုပ် [pdf] အသုံးပြုသူလက်စွဲ N10 စက်ရုပ် ပညာရေးဆိုင်ရာ ပရိုဂရမ်အသုံးပြုနိုင်သော မိုဘိုင်းစက်ရုပ်၊ N10၊ စက်ရုပ်ပညာရေးဆိုင်ရာ ပရိုဂရမ်အသုံးပြုနိုင်သော မိုဘိုင်းစက်ရုပ်၊ ပညာရေးဆိုင်ရာ ပရိုဂရမ်အသုံးပြုနိုင်သော မိုဘိုင်းစက်ရုပ်၊ ပရိုဂရမ်အသုံးပြုနိုင်သော မိုဘိုင်းစက်ရုပ်၊ မိုဘိုင်းစက်ရုပ်၊ စက်ရုပ် |