![]() ပြီးပြည့်စုံသောရေဒီယိုထိန်းချုပ်မှုစနစ်
ပြီးပြည့်စုံသောရေဒီယိုထိန်းချုပ်မှုစနစ်
အမြန်ဆက်တင်များအတွက် အသုံးပြုသူလက်စွဲ
REX ![]() လက်ခံသူ
လက်ခံသူ
လက်ခံသူ- အခြေခံလုပ်ထုံးလုပ်နည်း-
- သင့်တွင် လက်ခံသူတွင် နောက်ဆုံးပေါ်ဆော့ဖ်ဝဲဗားရှင်းရှိကြောင်း အတည်ပြုရန် JETI Studio ပရိုဂရမ်ကို အသုံးပြုပါ။
- လက်ခံသူအား အခြားမော်ဒယ်တွင် ယခင်က အသုံးပြုခဲ့လျှင် ၎င်းကို ထုတ်လွှင့်မှုမီနူး “Menu/Applications/ Jetibox” တွင် ဖော်မတ်လုပ်ပါ။

- လက်ခံသူကို transmitter ဖြင့် ချိတ်ပါ။
- မော်ဒယ်၏လုပ်ဆောင်ချက်များကို သာမန်လက်ခံသူအဖြစ် သတ်မှတ်ပါ။
- လက်ခံသူအား မော်ဒယ်တွင် ထားကာ တုန်ခါမှုကို ဆန့်ကျင်သည် (ဥပမာအားဖြင့် လက်ခံသူသည် လက်ခံသူနှင့် ပံ့ပိုးထားသော အပျော့စား နှစ်ထပ်ကော်တိပ်ဖြင့် မော်ဒယ်တွင် လက်ခံသူ)။ စံပြတွင် လက်ခံကိရိယာကို ပုဆိန်နှင့်အပြိုင် အမြဲထားရှိပြီး အကောင်းဆုံးအားဖြင့် မြေဆွဲအားဗဟို (CG) နှင့် အနီးကပ်ဆုံးထားပါ။
Transmitter - အခြေခံလုပ်ထုံးလုပ်နည်း
- Transmitter ကို USB ကြိုးမှတဆင့် PC သို့ချိတ်ဆက်ပြီး JETI Studio ပရိုဂရမ်တွင် transmitter တွင် soft ware နောက်ဆုံးထွက်ဗားရှင်းရှိလျှင် စစ်ဆေးပါ။ အနည်းဆုံးလိုအပ်သောဗားရှင်းမှာ v. 4.24 ဖြစ်သည်။
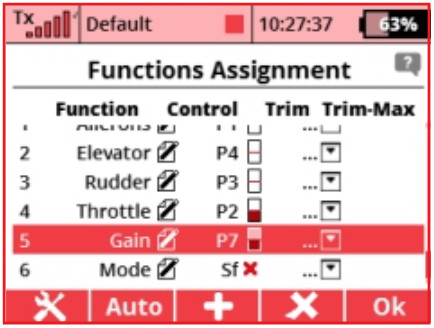
- transmitter menu တွင် “Menu/ Model/ Functions Assignment” တွင် တည်ငြိမ်မှုမုဒ်များပြောင်းခြင်း (ဥပမာ Assist Mode) နှင့် ၎င်း၏ sensitivity (ဥပမာ Assist Gain) အတွက် လုပ်ဆောင်ချက်အသစ်တစ်ခုကို ဖန်တီးပါ။ ထို့နောက် ထိန်းချုပ်မှုများကို လုပ်ဆောင်ချက်များကို သတ်မှတ်ပေးပါ။ Threeposition switch သည် "Mode" လုပ်ဆောင်ချက်အတွက် သင့်လျော်ပြီး rotary potentiometer သည် "Gain" လုပ်ဆောင်ချက်အတွက် သင့်လျော်ပါသည်။
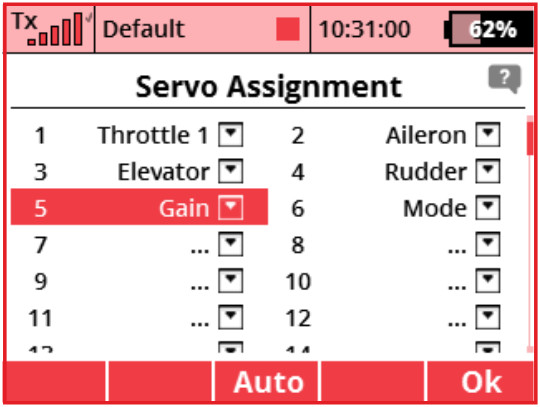
- Transmitter မီနူး “Menu/Model Server Assignment” တွင်၊ ဤလုပ်ဆောင်ချက်အသစ်များကို အခြားလုပ်ဆောင်ချက်များအတွက် သင်အသုံးမပြုသော အခမဲ့ချန်နယ်များသို့ သတ်မှတ်ပေးပါ။
အခြေခံအကူအညီဆက်တင်များ
- လက်ခံသူမီနူး “Menu/ Model/Device Explorer/REX ASSIST/Conation/Quick Wizard” တွင် အခြေခံဆက်တင်များကို ပြုလုပ်ပါ။ အဆင့်များကို ဂရုတစိုက်လိုက်နာပါ။
- “ဆားဗစ်အားလုံး ဒစ်ဂျစ်တယ်” ကို ရွေးချယ်ပါက ဆာဗာအထွက်အားလုံးအတွက် အထွက်ကာလကို 7.5ms ဟု သတ်မှတ်မည်ဖြစ်ပြီး သို့မဟုတ်ပါက 17.5ms ကို အသုံးပြုပါ။ လက်ခံသူသို့ ချိတ်ဆက်ထားသော စက်များအားလုံးသည် ရွေးချယ်ထားသော အထွက်ကာလ (ဆီပန့်၊ စသည်) ကို ပံ့ပိုးထားကြောင်း သေချာပါစေ။
- တုတ်များကို အလွန်ဂရုတစိုက် ချိန်ညှိပြီး “မူလတန်းချန်နယ်များတာဝန်” မီနူးရှိ ညွှန်ကြားချက်များအတိုင်း ပြုလုပ်ပါ။
- ယခင်အဆင့်များ (Assist Mode) တွင် ဖန်တီးထားသည့် "ပျံသန်းမှုမုဒ်များ ချန်နယ်" လုပ်ဆောင်ချက်သို့ ခလုတ်ကို သတ်မှတ်ပေးပါ။
Stabilization Gain (အာရုံခံနိုင်စွမ်း) ထိန်းချုပ်မှု ဆက်တင်များ-
လက်ခံသူမီနူးတွင် “Conation/ Channel Assignment/ ထပ်ဆောင်းချန်နယ်များကို အပ်နှင်းခြင်း/ Gain tuning channels” တွင် ယခင်အဆင့်များတွင် ဖန်တီးထားသော potentiometer (Assist Gain) ကို သတ်မှတ်ပေးပါ။ ပုဆိန်အားလုံးအတွက် တူညီသောထိန်းချုပ်မှုကို သင်သတ်မှတ်နိုင်သည်။
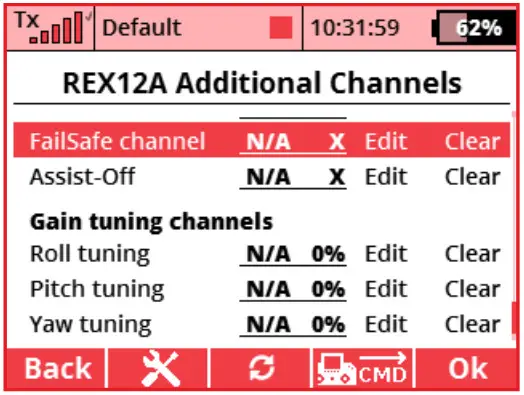
မှတ်ချက် - Gain Tuning Channels” မီနူးတွင်ပြသထားသည့်တန်ဖိုး (%) သည် ရလဒ်ရရှိသည့်အမြတ်သည် ပြသပြီးလက်ခံသူ၏ “Conation/Airplane Settings” မီနူးတွင်ပြသထားသည့်လုပ်ဆောင်ချက်တစ်ခုစီအတွက်တန်ဖိုးထက်မည်မျှပိုမိုမြင့်မားသည် သို့မဟုတ် နိမ့်ကြောင်းပြသထားသည်။
တည်ငြိမ်ခြင်းမုဒ်ကို သတ်မှတ်ခြင်း-
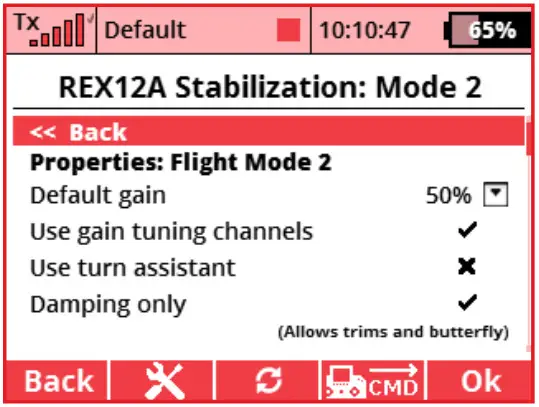
Assist စနစ်သည် တည်ငြိမ်မှုမုဒ်ခြောက်ခုကို ပံ့ပိုးပေးထားပြီး ၎င်းတို့ထဲမှ သုံးခုကို ရွေးချယ်နိုင်ပြီး အပြောင်းအလဲအတွင်း ရွေးချယ်ထားသောမုဒ်များကို ယခင်အဆင့်များတွင် ဖန်တီးထားသည့် ထိန်းချုပ်မှုဖြင့် ပြောင်းထားသည် (Assist Mode switch)။ ရွေးချယ်ထားသောမုဒ်တစ်ခုစီကို "တည်းဖြတ်ရန်" မီနူးတွင် ချိန်ညှိနိုင်သည်။

t modes ၏ ရှင်းလင်းချက်
လူကိုယ်တိုင် - တည်ငြိမ်မှုကို ပိတ်ထားသည်
လေ့ကျင့်ရေး - တည်ငြိမ်မှုသည် လေလှိုင်းလေထန်မှုကို တုံ့ပြန်ပြီး axes အားလုံးတွင် အများဆုံးဖြစ်နိုင်သော စောင်းထောင့်များကို ကန့်သတ်ထားသည်။ ကန့်သတ်တန်ဖိုးများကို ချိန်ညှိနိုင်သည်။ ဥပမာ၊ မုဒ်သည် သင့်လျော်သည်။ample၊ သင်ယူရန်။ Acrobatics သည် ဤမုဒ်တွင် မဖြစ်နိုင်ပါ။
အခန်းအောင်းသည်။ - အသက်သွင်းပြီးနောက်၊ မော်ဒယ်ကို အလျားလိုက် om အနေအထားတွင် ထည့်သွင်းထားသည်။ ပြဿနာတစ်ခု (တိမ်းညွှတ်မှုပျောက်ဆုံးခြင်း စသည်) တွင် ဤမုဒ်ကို အချိန်တိုအတွင်းသာ အသက်သွင်းရန် ကောင်းပါတယ်။ ထိန်းချုပ်ချောင်းသည် ကြားနေသို့ ပြန်သွားတိုင်း၊ ဝင်ရိုးအတိအကျရှိ မော်ဒယ်သည် မိုးကုတ်စက်ဝိုင်းသို့ တက်ကြွစွာ ပြန်သွားပါသည်။
ပုံမှန် - အခြေခံတည်ငြိမ်မှုမုဒ်။ ၎င်းသည် အလင်းရောင်ကို “ငြိမ်သက်” စေကာ လေလှိုင်းလေထန်ခြင်း၏ အကျိုးသက်ရောက်မှုကို လျှော့ချပေးသည်၊ သို့သော် ထိန်းချုပ်မှုနှင့် လေယဉ်ပစ်ခြင်း၏ အာရုံခံနိုင်စွမ်းကို ကန့်သတ်မထားပေ။
Heading Hold - အသက်သွင်းပြီးနောက်၊ တည်ငြိမ်မှုသည် မော်ဒယ်ကို အတိအကျအနေအထားတွင် ဆက်လက်ထားရှိရန် ကြိုးစားသည်။ ဥပမာ၊ မုဒ်သည် သင့်လျော်သည်။ample, Prop hanging, low passes, ဓားအစွန်း။ သိမ်းယူခြင်းနှင့် ဆင်းသက်ခြင်းအတွက် ဤမုဒ်ကို အသုံးမပြုပါနှင့် (ကုပ်အမြန်နှုန်းနှင့် နီးသည်)။
2D မုဒ် - "လေ့ကျင့်ရေး" နှင့်ဆင်တူသောမုဒ်တစ်ခုဖြစ်သော်လည်း၎င်းသည်တက်ကြွသောအမြင့်တည်ငြိမ်မှုကိုထည့်သွင်းထားသည်။ ဓာတ်လှေကားကို သင်မထိန်းချုပ်ပါက၊ အမြင့်ကို 1-2 မီတာ တိကျစွာထားရှိမည်ဖြစ်သည်။
Assist ဖြင့် ပထမဆုံးပျံသန်းခြင်း-
- Assist လုပ်ဆောင်ချက်ဖြင့် မော်ဒယ်ကို အမြဲတမ်း ချုံ့ပြီး ဖြတ်တောက်ပြီးနောက် Assist (ချောင်းယူနစ် နှစ်ခုလုံး) ရှိ ပင်မထိန်းချုပ်မှုများကို ပြန်လည်ချိန်ညှိပြီးနောက်၊
- “Horizon” မုဒ်ကို ရွေးပြီး မြင့်မားသော အာရုံခံနိုင်စွမ်း (Gain) ကို သတ်မှတ်ပါ)၊ တည်ငြိမ်မှုသွေဖည်ခြင်း၏ အာရုံကို စစ်ဆေးပါ။ မော်ဒယ်၏ အနေအထားကို ပြောင်းလဲသောအခါ ၎င်းသည် ထိန်းချုပ်မှု မျက်နှာပြင်များနှင့် ဆန့်ကျင်ဘက် ဦးတည်ချက်ဖြင့် တုံ့ပြန်သင့်သည်။
- မယူမီ၊ တည်ငြိမ်မှုရရှိခြင်းထိန်းချုပ်မှု (potentiometer) ကို အနိမ့်ဆုံးသတ်မှတ်ပြီး တည်ငြိမ်မှုကို "Manual" မုဒ်သို့ပြောင်းပါ (ဆိုလိုသည်မှာ OF )
- အဆင့်တည်ငြိမ်မှုကို "ပုံမှန်" မုဒ်သို့ပြောင်းပါ။ အေးဆေးတည်ငြိမ်စွာနှင့် နူးညံ့သိမ်မွေ့သော ဆားကစ်များတွင် ပျံသန်းပါ။ ထိန်းချုပ်မှုမျက်နှာပြင်များ တုန်လှုပ်သွားခြင်း (over stabilised) မော်ဒယ်မငြိမ်မသက်ဖြစ်လာသည်အထိ တည်ငြိမ်မှုရရှိမှုကို ဖြည်းဖြည်းချင်းတိုးပေးပါ။ တည်ငြိမ်မှုရရှိမှုကို အနည်းငယ်လျှော့ချပြီး မော်ဒယ်သည် ပိုမိုမြင့်မားသောအမြန်နှုန်းများတွင်ပင် တည်ငြိမ်ကြောင်း စစ်ဆေးပါ။
- မော်ဒယ်၏ တည်ငြိမ်မှုကို ချိန်ညှိခြင်းအတွက်၊ သင်သည် ရူဒါတစ်ခုစီအတွက် အာရုံခံနိုင်စွမ်းကို သီးခြားစီ ချိန်ညှိနိုင်သည် (အခန်း "Setting the stabilization gain control" ကိုကြည့်ပါ၊
တည်ငြိမ်မှုစနစ်၏ သင့်လျော်သောလုပ်ဆောင်မှုများအတွက်၊ အောက်ပါအခြေခံမူများကို သတိရပါ။
- transmitter နှင့် receiver software ကို ပုံမှန် update လုပ်ပါ။
- မော်ဒယ်ကို ဖြတ်တောက်မှုတိုင်းပြီးနောက်၊ Assist ၏ "ပင်မချန်နယ်များ" ကို ချိန်ညှိပါ (ချောင်းယူနစ်နှစ်ခုလုံး)
- မော်ဒယ်တွင် ဆာဗာကို အစားထိုးသည့်အခါတိုင်း၊ Assist (ချောင်းများ) ၏ "ပင်မချန်နယ်များ" ကို ချိန်ညှိပါ။ ဆာဗာသည် စက်ရုံမှ ပြောင်းပြန်လည်ပတ်မှု ဖြစ်နိုင်သည်။
- ပါဝါဖွင့်ထားစဉ်တွင်၊ စနစ်က “အဆင်သင့်ဖြစ်ပြီဟု သတင်းပို့သည်အထိ မော်ဒယ်ကို ငြိမ်ပြီး ခန့်မှန်းခြေ အလျားလိုက် ထားပါ။
- တည်ငြိမ်မှုမုဒ် ခလုတ်အတွက်၊ စနစ်အား အချိန်မရွေး ပိတ်နိုင်စေရန် အနေအထားတွင် “Manual” မုဒ်သို့ ခလုတ်ကို သတ်မှတ်ပါ။
- ပါဝါထောက်ပံ့မှုသည် လုံလောက်စွာ ကြီးမားကြောင်း သေချာပါစေ။ တက်ကြွတည်ငြိမ်မှုရှိသော မော်ဒယ်သည် လက်ရှိသုံးစွဲမှုကို တိုးလာသည် (ဆာဗာများ ရွေ့လျားနေသည်)
- မသေချာပါက JETI မော်ဒယ်နည်းပညာဝန်ဆောင်မှု သို့မဟုတ် သင့်ဒေသခံ အရောင်းကိုယ်စားလှယ်ကို အကူအညီတောင်းပါ။
ExampREX Assist ၏ ဖြစ်နိုင်ချေ အနည်းငယ်သော ချိတ်ဆက်မှုများ
က) REX 10 Assist လက်ခံသူအား Rsat 900 အရန်လက်ခံသူနှင့် ချိတ်ဆက်ခြင်း။

b) REX9 Slim Assist လက်ခံသူနှင့် Rsat900 အရန်သိမ်းဆည်းမှုနှင့်အတူ Central Box ချိတ်ဆက်မှု။ 2.4GHz အချက်ပြမှု ပျက်ကွက်ပြီး 900MHz ကြိမ်နှုန်း အရန်ကူးသို့ ထုတ်လွှင့်မှုသို့ ပြောင်းလျှင်ပင် တည်ငြိမ်မှုကို လုပ်ဆောင်ပါမည်။ Fail-Safe လုပ်ဆောင်ချက်များသည် လက်ခံသူနှစ်ဦးစလုံးအတွက် (“အသိဉာဏ်” အပါအဝင်)၊ Fail-Safe လုပ်ဆောင်ချက်သည် Central Box တွင် အလုပ်လုပ်ပါသည်။

ဂ) တူညီသော ချိတ်ဆက်မှု ၊ သို့သော် 2.4 Ghz လှိုင်းအတွက် လက်ခံသူ နှစ်ခု ရှိသည်။
“Double Path” မုဒ်ကို transmitter menu “Advanced properties/Wireless modes” တွင် သတ်မှတ်ထားသည်။ လက်ခံသူအားလုံးအတွက် Fail-Safe ကိုပိတ်ထားသည် (“အသိဉာဏ်” အပါအဝင်) Central Box တွင် Fail-Safe လုပ်ဆောင်ချက်ကို လုပ်ဆောင်နေပါသည်။

စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
JETI မော်ဒယ် Complex Radio Control စနစ် [pdf] အသုံးပြုသူလက်စွဲ JDEX-RR9S-A၊ REX Assist လက်ခံသူ၊ REX Assist၊ လက်ခံသူ၊ ရှုပ်ထွေးသော ရေဒီယိုထိန်းချုပ်စနစ်၊ ရေဒီယိုထိန်းချုပ်မှုစနစ် |