![]() မော်ဒယ်- D10 2D LiDAR
မော်ဒယ်- D10 2D LiDAR
အသုံးပြုသူလက်စွဲ
အမြန်စတင်ပါ။
USB ဒရိုက်ဗာကို တပ်ဆင်ပြီး USB ကြိုးကို PC တွင် ပလပ်ထိုးထားကြောင်း သေချာပါစေ။
စက်ပစ္စည်းအား ပါဝါထောက်ပံ့မှု (+5V±10%, 3A) သို့ ချိတ်ဆက်ပါ။
ကျွန်ုပ်တို့၏ဒေတာရယူခြင်းနှင့် ခွဲခြမ်းစိတ်ဖြာခြင်းဆော့ဖ်ဝဲကို လုပ်ဆောင်ပါ၊
ထို့နောက် မှန်ကန်သောဆက်သွယ်ရေးပို့တ်ကိုရွေးချယ်ပြီး baud နှုန်းကို 921600bps သို့သတ်မှတ်ပါ။
စတင်ရန် ”” ခလုတ်ကို နှိပ်ပြီး အလုပ်စတင်ပါ။
(ဗားရှင်း V8.01.8)
နောက်ထပ်အချက်အလက်များနှင့် ပံ့ပိုးမှုများအတွက် ကျေးဇူးပြု၍ ဝင်ရောက်ကြည့်ရှုပါ။ http://www.top1sensor.com
သတ်မှတ်ချက်များ
| ပစ္စည်းများ | ကန့်သတ်ချက်များ |
| စကင်န်ဖတ်ခြင်းအပိုင်း ၁ | 0.15m-10m၊ 6m@10% |
| တိုင်းတာမှုအမှား ၂ | ±3CM@IOM@I0Hz |
| စကင်န်ထောင့်အပိုင်းအခြား | 360° |
| ထောင့်ပြတ်သားမှု | 0.28° |
| စကင်န်ကြိမ်နှုန်း ၃ | 10Hz |
| တိုင်းတာမှုအကြိမ်ရေ | 14.28Khz |
| Output Interface | TTL |
| အဝေးသင် resolution | 1 စင်တီမီတာ |
| လေဆာအရင်းအမြစ် | လေဆာ diode 905nm, <1mW; GB7247.1-2001 ကိုလိုက်နာပါ။ Class 1 လေဆာမျက်လုံးဘေးကင်းရေးလိုအပ်ချက်များ |
| လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | DC 5V±10%, ပါဝါသုံးစွဲမှု < 3W စတင်သည့် လက်ရှိ > 1.5A |
| အတွဲ | 78x78x56 မီလီမီတာ |
| လည်ပတ်အပူချိန် အပိုင်းအခြား | - 10°C မှ +50°C |
| သိုလှောင်မှု အပူချိန် အပိုင်းအခြား | - 20°C မှ +70°C |
| ကာကွယ်မှုအဆင့် | IP54 |
| အလေးချိန် | 190 ဂရမ် |
| အလုပ်လုပ်နေလို့ | စံအခြေအနေအရ နာရီ 50,000 |
မှတ်စုများ-
- အလင်းပြန်မှု 10% သာရှိပြီး 6m တိုင်းတာနိုင်သော အမှောင်အရောင်၊ Kadar အဖြူ 10m အထိ၊
- တိုင်းတာခြင်းအကွာအဝေး 3m နှင့် စကင်န်ဖတ်ခြင်းအကြိမ်ရေ 10Hz ဖြစ်သောအခါ တိုင်းတာခြင်း ထပ်တလဲလဲနိုင်မှု တိကျမှုသည် ±10cm ဖြစ်သည်။
- ပုံသေလှည့်နှုန်းသည် တစ်စက္ကန့်လျှင် 10 revolutions ဖြစ်သည်။
အဘက်ဘက်မှ ပုံဆွဲခြင်း။
2.1 ပုံဖေါ်ခြင်း။

2.2 အတိုင်းအတာများ

တပ်ဆင်ခြင်းနှင့်ချိတ်ဆက်မှု
3.1 ထည့်သွင်းခြင်း။

3.2 ချိတ်ဆက်မှု
3.2.1 Wiring Diagram

3.2.2 10pin ချိတ်ဆက်မှုကေဘယ်လ်၏ အဓိပ္ပါယ်ဖွင့်ဆိုချက်
| တံ | လုပ်ဆောင်ချက် | အရောင် | မှတ်စုများ |
| 0 | +5V±10% | အနီရောင် | DC ပါဝါထောက်ပံ့မှု +5V |
| 1 | GND | အဖြူ | DC ပါဝါမြေ |
| 2 | Tx | အဝါရောင် | ပြင်ပ TTL Rx သို့ ချိတ်ဆက်ပါ။ |
| 3 | Rx | အစိမ်းရောင် | ပြင်ပ TTL Tx သို့ ချိတ်ဆက်ပါ။ |
| 4 | GND | အနက်ရောင် | အတွင်းပိုင်း GND သို့ ချိတ်ဆက်ပါ။ |
3.2.3 ပါဝါထောက်ပံ့မှု
ပါဝါထောက်ပံ့မှု +5V±10%။ စတင် voltage သည် 5V ဖြစ်ရန် လိုအပ်ပြီး၊ စတင်လက်ရှိ 1500mA ဖြစ်ရန် လိုအပ်ပြီး ပုံမှန်အလုပ်လုပ်နေသော Current မှာ 500mA ဖြစ်သည်။ သို့သော် power supply ၏ ripple coefficient သည် 40mV ထက် မပိုသင့်ပါ။ စက်ရုံဆက်တင်မှာ ပါဝါဖွင့်ပြီးနောက် D10 သည် အလိုအလျောက် လည်ပတ်နေပါသည်။
ဆော့ဖ်ဝဲ ဆက်တင်
4.1 Driver တပ်ဆင်ခြင်း။
USB ဒရိုက်ဗာကို အောင်မြင်စွာထည့်သွင်းပြီးနောက်၊ ၎င်းသည် com port ကိုမှတ်မိကြောင်းအတည်ပြုရန် Lidar ကိုကွန်ပျူတာသို့ချိတ်ဆက်ပြီးနောက် ပါဝါကိုဖွင့်ပါ။ ပါဝါကို ဦးစွာဖွင့်ပြီးနောက် ချိတ်ဆက်ပါက၊ ကွန်ပျူတာမောက်စ်သည် ထိန်းချုပ်မှု မရှိတော့သည့် ဖြစ်နိုင်ခြေရှိသည်။ လည်ပတ်မှုအပိုင်းကို ဂရုပြုပါ။ “ဆော့ဝဲလ် exe ကိုဖွင့်ပါ။ file"ပုံမှန်အတိုင်းသုံးလို့ရတယ်။
အချို့သော PC များသည် LiDAR ချိတ်ဆက်ပြီးနောက် ဒရိုက်ဗာကို အလိုအလျောက် ထည့်သွင်းနိုင်သည်၊ အကယ်၍ မဟုတ်ပါက၊ ကျွန်ုပ်တို့၏ဆော့ဖ်ဝဲလ်ပက်ကေ့ခ်ျတွင် CP210X ဒရိုက်ဘာကို ဒေါင်းလုဒ်လုပ်ပါ။
4.2 ဒေတာရယူခြင်း။
'Favelas LiDAR Point Cloud Data Acquisition and Analysis System.exe' ပရိုဂရမ်ကို လုပ်ဆောင်ရန်၊ ဆက်သွယ်ရေးဆက်တင်ဝင်းဒိုး (ပုံ 1 ကိုကြည့်ပါ) ပေါ်လာပါမည်။ ပထမဦးစွာ device D10 ကိုရွေးချယ်ပါ။ ဒုတိယ၊ စက်နှင့်သက်ဆိုင်သော အမှတ်စဉ် ပို့တ်နံပါတ်ကို ရွေးချယ်ပါ၊ ကွန်ပျူတာနှင့် ချိတ်ဆက်ထားသော အမှတ်စဉ် ပေါက်ကို ပရိုဂရမ်က အလိုအလျောက် ဖော်ထုတ်နိုင်ပါသည်။ တတိယ၊ baud rate 921600 ကိုရွေးပါ။ စတုတ္ထ၊ စောင့်ကြည့်ရေးအင်တာဖေ့စ်သို့ဝင်ရောက်ရန် 'Yes' ကိုနှိပ်ပါ (ပုံ 2 ကိုကြည့်ပါ)။ Baud နှုန်း- 921600 bps၊ ပါရီဘစ်- မရှိ၊ ဒေတာဘစ်- 8၊ ရပ်တန့်ဘစ်- 1

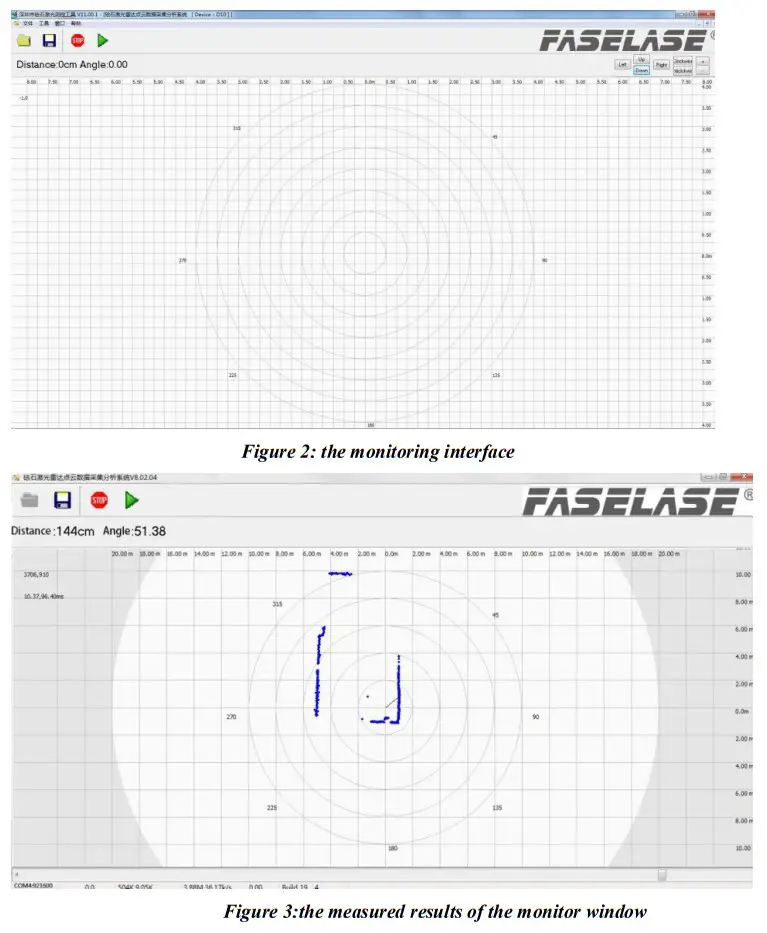
save icon ကိုနှိပ်ပါ။![]() လက်ရှိ စက်ဝိုင်းအတွင်း တွေ့ရှိသည့် အမှတ်အရေအတွက်နှင့် အမှတ်တစ်ခုစီ၏ အကွာအဝေးနှင့် ထောင့်ကို ပြသရန်။
လက်ရှိ စက်ဝိုင်းအတွင်း တွေ့ရှိသည့် အမှတ်အရေအတွက်နှင့် အမှတ်တစ်ခုစီ၏ အကွာအဝေးနှင့် ထောင့်ကို ပြသရန်။
စက်ဝိုင်းတစ်ခုစီ၏အချိန်နှင့်တစ်ပြေးညီသိရှိမှုဒေတာပြောင်းလဲမှုများကိုစောင့်ကြည့်ရန် 'တစ်ဘက်မြင်မျက်နှာပြင်' ကိုရွေးချယ်ရန် မော်နီတာမျက်နှာပြင်ရှိ ညာဘက်မောက်စ်ခလုတ်ကို နှိပ်ပါ။
Save icon ကိုနှိပ်ပါ။![]() စမ်းသပ်ဒေတာကို စတင်မှတ်တမ်းတင်ရန်၊ အမည်နှင့် လမ်းကြောင်းကို သတ်မှတ်ရန်၊ OK ကိုနှိပ်ပါ၊ မှတ်တမ်းတင်ခြင်းကို အဆုံးသတ်ရန်၊ သိမ်းဆည်းရန် ခလုတ်ကို ထပ်မံနှိပ်ပါ၊ ဒေတာမှတ်တမ်းတင်ခြင်းကို အပြီးသတ်ရန် ပေါ့ပ်အပ်ဝင်းဒိုးတွင် Cancel ကို နှိပ်ပါ။
စမ်းသပ်ဒေတာကို စတင်မှတ်တမ်းတင်ရန်၊ အမည်နှင့် လမ်းကြောင်းကို သတ်မှတ်ရန်၊ OK ကိုနှိပ်ပါ၊ မှတ်တမ်းတင်ခြင်းကို အဆုံးသတ်ရန်၊ သိမ်းဆည်းရန် ခလုတ်ကို ထပ်မံနှိပ်ပါ၊ ဒေတာမှတ်တမ်းတင်ခြင်းကို အပြီးသတ်ရန် ပေါ့ပ်အပ်ဝင်းဒိုးတွင် Cancel ကို နှိပ်ပါ။
Open History ကိုနှိပ်ခြင်းဖြင့် မှတ်တမ်းတင်ထားသောဒေတာကိုလည်း ဖွင့်နိုင်သည်။ File ခလုတ်
ဆက်သွယ်ရေးပရိုတိုကော
5.1 ဒေတာ ဖော်မတ်ကို ထုတ်ပေးသည်။
5.1.1 Binary အထွက်- အကွာအဝေးနှင့် ထောင့်တန်ဖိုးများ အပါအဝင် 4 bytes။
5.1.2 အကွာအဝေးစမ်းသပ်မှုဒေတာပက်ကေ့ခ်ျတစ်ခုစီတွင် 4 bytes (A၊ B၊ C၊ နှင့် D တို့ကို အစဉ်လိုက် တံဆိပ်တပ်ထားသည်။၊
byte တစ်ခုစီတွင် 8 bits ရှိပြီး A7,A6,…,A1,A0, B7,B6,…,B1,B0, C7,C6,…,C1,C0.and D7,D10,…,D1,D0 တို့နှင့် သက်ဆိုင်ပါသည်။
5.1.3 ပထမ 3 bytes ၏ MSB များသည် 0 (A7၊ B7၊ C7) ဖြစ်ပြီး နောက်ဆုံး byte ၏ MSB သည် 1 (D7) ဖြစ်ပြီး data pack ၏အဆုံးကို ညွှန်ပြသည်။ ဒေတာပက်ကတ်တစ်ခုစီတွင် 4*7 = 28 bits မှန်ကန်သောဒေတာ ရှိပါသည်။
byte A ၏ A6၊ A5၊ A4 သည် check bit ဖြစ်သည်။ တိကျသော အယ်လဂိုရီသမ်အတွက်၊ နောက်အပိုင်းရှိ ဒေတာစစ်ဆေးသည့် အယ်လဂိုရီသမ်ကို စစ်ဆေးပါ။
A3၊ A2၊ A1၊ A0၊ B6၊ … B0၊ C6 သည် အကွာအဝေးတန်ဖိုးများ (စုစုပေါင်း 12 bits)၊ ၎င်း၏အကွာအဝေးသည် 0~4000cm ဖြစ်သည်။
C5…C0၊ D6၊…D0 များသည် တိုင်းတာသည့် ထောင့်တန်ဖိုးများ (စုစုပေါင်း ဂဏန်း ၁၃ လုံး) ဖြစ်သည်။ ၎င်း၏အကွာအဝေးသည် 13 ~ 0 ဖြစ်ပြီး၊ ထောင့်တိကျမှုသည် 5759/1 ဒီဂရီဖြစ်သည်။
| ဘစ် | A7 | A6 | A5 | A4 | A3 | A2 | Al | AO |
| တန်ဖိုး | 0 | စစ်ဆေးပါ။ | စစ်ဆေးပါ။ | စစ်ဆေးပါ။ | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး |
| ဘစ် | B7 | B6 | B5 | B4 | B3 | B2 | ခ ၄ | BO |
| တန်ဖိုး | 0 | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး | အကွာအဝေး |
| ဘစ် | C7 | C6 | C5 | C4 | C3 | C2 | C ၁ | CO |
| တန်ဖိုး | 0 | အကွာအဝေး | ထောင့် | ထောင့် | ထောင့် | ထောင့် | ထောင့် | ထောင့် |
| ဘစ် | D7 | ဃ ၂ | D5 | D4 | D3 | D2 | D1 | DO |
| တန်ဖိုး | 1 | ထောင့် | ထောင့် | ထောင့် | ထောင့် | ထောင့် | ထောင့် | ထောင့် |
ဒေတာစစ်ဆေးသည့် အယ်လဂိုရီသမ်
အက္ခရာတစ်ခုစီတွင် 8 bits (bit7~bit0) ရှိပြီး ဘစ်တစ်ခုစီသည် 0 သို့မဟုတ် 1 ဖြစ်နိုင်ပါသည်။ A6၊A5၊A4 သည် B,C,D 3 bytes ၏ အနိမ့် 1 bit ပေါင်းလဒ်ကို သိမ်းဆည်းထားပြီး algorithm ကိုစစ်ဆေးသောအခါတွင် B,C,D ၏ 3 bytes အတွင်းရှိ '1' အရေအတွက်ကို အရင်ရယူပါ၊ ဇယားကိုရှာကြည့်ပြီးနောက် အောက်ဘက်တွင် 3 bit များကို နှိုင်းယှဉ်ပြီး ပေါင်းထည့်ပါ။ A3၊A6၊A5၊ ၎င်းတို့သည် တသမတ်တည်းဖြစ်ပါက၊ တိုင်းတာမှုရလဒ်များကို လက်မှတ်မထိုးထားသော char GetCrcPackage4Byte (လက်မှတ်မထိုးထားသော char *buf) ကိုထုတ်ပေးပါ။
{။ လက်မှတ်မထိုးထားသော char B,C,D;
B = buf[1];
C = buf[2];
D = buf[3];
//chit သည် 1-0 static unsigned char cubit[255] = {
၁၀၅၊
၁၀၅၊
၁၀၅၊
၁၀၅၊
၁၀၅၊
၁၀၅၊
၁၀၅၊
၁၀၅၊
};
ပြန်လာ (တတောင်[B]+တတောင်[C]+chit[D])&0x07; } B,C,.D ၏ 3 bytes တွင် 1 ၏ ပေါင်းလဒ်ကို အနိမ့် 3 ဂဏန်းကို ပြန်ပေးသည်။
ဒေတာခွဲခြမ်းစိတ်ဖြာမှု algorithm
//buf သည် A, B, C အဖြစ် 3 bytes ကို အစဉ်လိုက်သိမ်းဆည်းထားသည့် ဒေတာပက်ကေ့ချဲညွှန်ကိရိယာတစ်ခုဖြစ်သည်။
//return အကွာအဝေးတန်ဖိုး၊ data check မမှန်ပါက -1 ကိုပြန်ပေးပါ။
// Int Decode Lase Data (လက်မှတ်မထိုးထားသော char *buf)
{ Int အကွာအဝေး; လက်မှတ်မထိုးထားသော char cordate = GetCrcPackage3Byte(buf);
//လက်မှတ်မထိုးထားသော char orgcrc = (buf[0]>>4)&0x07;
if(cordate!= (buf[0]>>4))
ပြန်လာ-1; ;
// အကွာအဝေးကို တွက်ချက်ပါ။ A0၊B6..B0၊C6…C0
. အကွာအဝေး = ((buf[0]&0x1)<<14)+(buf[1]&0x7F)<<7)+((buf[2]&0x7F)); ပြန်အကွာအဝေး ;
}
//
//buf သည် A, B, C နှင့် D အဖြစ် 4 bytes ကို အစဉ်လိုက်သိမ်းဆည်းထားသည့် ဒေတာပက်ကေ့ချဲညွှန်ပြချက်တစ်ခုဖြစ်သည်။
//ဒေတာစစ်ဆေးခြင်း မမှန်ပါက -1 typedef struct{ အကွာအဝေးသို့ ပြန်ပို့ပါ။
Int Angle;
}FSDNode;
bool DecodeFSD10(FSDNode *nodelist၊ unsigned char *buf) { unsigned char cordate = GetCrcPackage4Byte(buf);// B,C,.D ၏ 3 bytes အတွင်းရှိ 1 ၏ ပေါင်းလဒ်ဖြစ်သော ဂဏန်း 3 လုံးအနိမ့်ကို တွက်ချက်ပါ။
လက်မှတ်မထိုးထားသော char orgcrcdata = (buf[0]>>4)&0x07;//မူရင်းစစ်ဆေးချက်ကို ရယူပါ A6,A5,A4 if(orgcrcdata!= cordate) false ပြန်ပေးသည်၊
လက်မှတ်မထိုးထားသော Int အကွာအဝေးထောင့်
// အကွာအဝေးကို တွက်ချက်ပါ။
အကွာအဝေး = (buf[0]&0x0F);
အကွာအဝေး <<= 7;
အကွာအဝေး += (buf[1]&0x7F);
အကွာအဝေး <<= 1;
if(buf[2]&0x40)
အကွာအဝေး ++; ဝတ္ထုရေးဆရာ->အကွာအဝေး = အကွာအဝေး;
// ထောင့်ကို တွက်ချက်ပါ။
ထောင့် = buf[2]&0x3F;
ထောင့် <<= 7;
ထောင့် += (buf[3]&0x7F);
ဝတ္ထုရေးဆရာ->ထောင့် = ထောင့်၊
အမှန်ကိုပြန်ပါ။
ROS ယာဉ်မောင်းများကို ပံ့ပိုးပေးသည့် အင်ဂျင်နီယာဆိုင်ရာ ကိစ္စများနှင့် SDK ပက်ကေ့ဂျ်များ ပိုမိုရရှိရန် ကျွန်ုပ်တို့ထံ ဆက်သွယ်ပါ။
ပြသာနာရှာဖွေရှင်းပေးခြင်း
တိုင်းတာမှုအပိုင်းကို ထိခိုက်စေသည့်အချက်များ
D10 သည် ပတ်ဝန်းကျင်ဆိုင်ရာအချက်များကြောင့် တိုင်းတာမှုရလဒ်များကို သက်ရောက်မှုရှိသော အလင်းပြန်တိုင်းတာရေးကိရိယာတစ်ခုဖြစ်သည်။ ထို့ကြောင့် အမှန်တကယ် တိုင်းတာခြင်းရလဒ်သည် စံပတ်ဝန်းကျင်တွင် တိုင်းတာသည့် ပုံမှန်တန်ဖိုးနှင့် ကွဲပြားနိုင်သည်။
အောက်ပါအချက်များသည် အမှန်တကယ်တိုင်းတာခြင်းအပိုင်းကို အကျိုးသက်ရောက်စေမည်ဖြစ်သည်။
| အကြောင်းရင်းများ | ရလဒ်ကိုထိခိုက်စေတယ်။ |
| Multipath ရောင်ပြန်ဟပ် | အခြားအရာဝတ္ထုများမှ လေဆာစွမ်းအင်သည် ပစ်မှတ်မှပြန်လာသော စွမ်းအင်ထက်ကျော်လွန်သည့်အခါ တိုင်းတာမှုရလဒ်များ မှားယွင်းနေပါသည်။ |
| ပွင့်လင်းသောမျက်နှာပြင် | တိုင်းတာခြင်းပစ်မှတ်သည် အရောင်မဲ့အရည်များ သို့မဟုတ် မျက်မှန်များဖြစ်သောအခါ မှားယွင်းသော ရလဒ်များ ဖြစ်ပေါ်နိုင်သည်။ |
| သေးငယ်သောအရာဝတ္ထု | တိုင်းတာထားသော အရာဝတ္တုသည် လေဆာအစက်ထက် သေးငယ်သောအခါ သို့မဟုတ် လေဆာသည် တိုင်းတာထားသော အရာဝတ္ထု၏ ထောင့်ကို တိုင်းတာသောအခါ၊ မှားယွင်းသော တိုင်းတာမှုရလဒ်များ ဖြစ်ပေါ်နိုင်သည်။ |
Standard နှင့် ရွေးချယ်နိုင်သော ဆက်စပ်ပစ္စည်းများ
| မရှိ | ပစ္စည်းများ | အရေအတွက် | ပြီလေ။ |
| 1 | ပစ၀တ | 1 pc | |
| 2 | ဒေတာကြိုး | 1 pc | |
| 3 | TTL သို့ USB ပြောင်းပေးသည်။ | 1 pc | |
| 4 | DC +5V ပါဝါအဒက်တာ | 1 pc | ရွေးချယ်ခွင့် |
ကြှနျုပျတို့ကိုဆကျသှယျရနျ
Xi'an Hizon International Trade Co.,Ltd
http://www.top1sensor.com
Tel: +86-29-87858956
Fax: +86-29-87858956
Moby: +86-13201520716 မစ္စတာ Yang
အီးမေးလ်- contact@top1sensor.com
Add- No.68 Middle Sector South၊ Haunching Road၊ Xi'an၊ China
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
FASELASE D10 2D LiDAR အာရုံခံကိရိယာ [pdf] အသုံးပြုသူလက်စွဲ D10၊ D10 ပျားမျက်လုံးများ 360 ဒီဂရီ အာရုံခံ လမ်းကြောင်းပြမှု၊ 360 ဒီဂရီ အာရုံခံ လမ်းကြောင်းပြမှု၊ D10 2D LiDAR အာရုံခံကိရိယာ၊ D10၊ 2D LiDAR အာရုံခံကိရိယာ၊ LiDAR အာရုံခံကိရိယာ၊ အာရုံခံကိရိယာ |