EMKO PROOP Input သို့မဟုတ် Output Module

နိမိတ်ဖတ်
Proop-I/O Module ကို Prop စက်ဖြင့် အသုံးပြုပါသည်။ မည်သည့်အမှတ်တံဆိပ်အတွက်မဆို ဒေတာလမ်းကြောင်းတစ်ခုအဖြစ်လည်း အသုံးပြုနိုင်သည်။ Proop-I/O Module ကို ထည့်သွင်းရန်နှင့် ချိတ်ဆက်ရန် အသုံးပြုသူအား ဤစာရွက်စာတမ်းက အထောက်အကူဖြစ်စေပါမည်။
- ဤထုတ်ကုန်တပ်ဆင်ခြင်းမစတင်မီ၊ ညွှန်ကြားချက်လက်စွဲကိုဖတ်ပါ။
- စာရွက်စာတမ်း၏ အကြောင်းအရာများကို အပ်ဒိတ်လုပ်ထားနိုင်သည်။ အပ်ဒိတ်လုပ်ထားသော ဗားရှင်းကို တွင် သင်ဝင်ရောက်ကြည့်ရှုနိုင်ပါသည်။ www.emkoelektronik.com.tr
- လုံခြုံရေးသတိပေးချက်များအတွက် ဤသင်္ကေတကို အသုံးပြုသည်။ အသုံးပြုသူများသည် ဤသတိပေးချက်များကို အာရုံစိုက်ရပါမည်။
ပတ်ဝန်းကျင်အခြေအနေများ
| Operating အပူချိန် : | 0-50C |
| အမြင့်ဆုံးစိုထိုင်းဆ | 0-90%RH (အဘယ်သူမျှမ condensing) |
| အလေးချိန် | 238 ဂရမ် |
| အတိုင်းအတာ | 160 x 90 x 35 မီလီမီတာ |
အင်္ဂါရပ်များ
Proop-I/O module များကို inputs-outputs အရ အမျိုးအစားများစွာ ခွဲခြားထားသည်။ အမျိုးအစားများမှာ အောက်ပါအတိုင်းဖြစ်သည်။
| ထုတ်ကုန်အမျိုးအစား
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| Module ထောက်ပံ့မှု | |||||||||||
| 24 Vdc/Vac (Iolation) | 2 | |||
| ဆက်သွယ်ရေး | ||||
| RS-485 (အထီးကျန်) | 2 | |||
| ဒစ်ဂျစ်တယ် သွင်းအားစုများ | ||||
| 8x ဒစ်ဂျစ်တယ် | 1 | |||
| ဒစ်ဂျစ်တယ် ရုပ်ထွက်များ | ||||
| 8x 1A ထရန်စစ္စတာ (+V) | 3 | |||
| analog inputs | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| Analog Output များ | |||
| 2x 0/4…20mAdc
2x 0…10Vdc |
1 | ||
| 2 | |||
အတိုင်းအတာများ
Proop Device တွင် Module တပ်ဆင်ခြင်း။
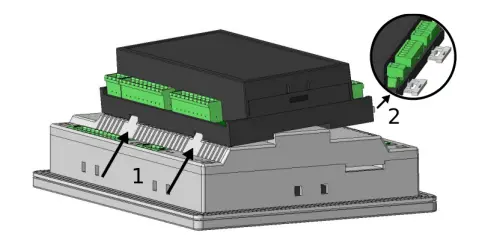 |
1- Prop I/O Module ကို ပုံတွင်ပြထားသည့်အတိုင်း Prop device ၏ အပေါက်များတွင် ထည့်သွင်းပါ။
2- လော့ခ်ချသည့် အစိတ်အပိုင်းများကို Proop-I/O Module ကိရိယာတွင် ပလပ်ထိုးစစ်ဆေးပြီး ဆွဲထုတ်ပါ။ |
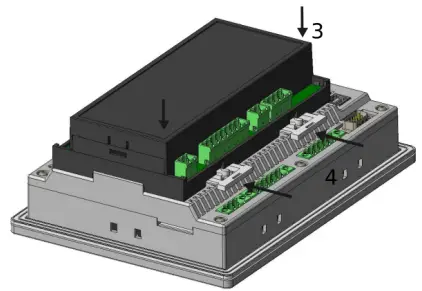 |
3- Proop-I/O Module device ကို သတ်မှတ်ထားသော ဦးတည်ချက်တွင် တင်းတင်းကျပ်ကျပ် နှိပ်ပါ။
4- သော့ခတ်ထားသော အစိတ်အပိုင်းများကို အထဲသို့ တွန်းထည့်ပါ။ |
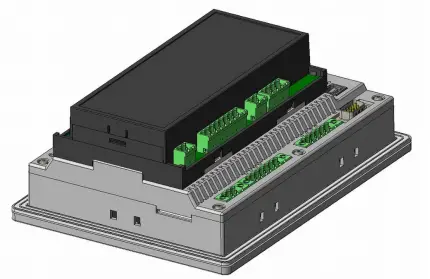 |
5- ထည့်သွင်းထားသော မော်ဂျူးကိရိယာ၏ ရုပ်ပုံသည် ဘယ်ဘက်ရှိ ပုံနှင့်တူသင့်သည်။ |
DIN-Ray တွင် Module တပ်ဆင်ခြင်း။
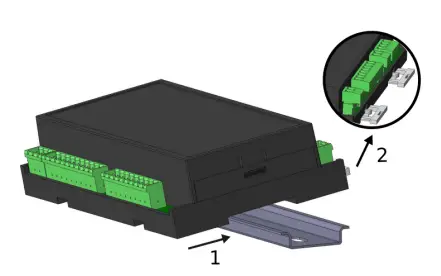 |
1- ပြထားသည့်အတိုင်း Proop-I/O Module ကိရိယာကို DIN-ray ပေါ်သို့ ဆွဲချပါ။
2- လော့ခ်ချသည့် အစိတ်အပိုင်းများကို Prop- I/O Module ကိရိယာတွင် ပလပ်ထိုးစစ်ဆေးပြီး ဆွဲထုတ်ပါ။ |
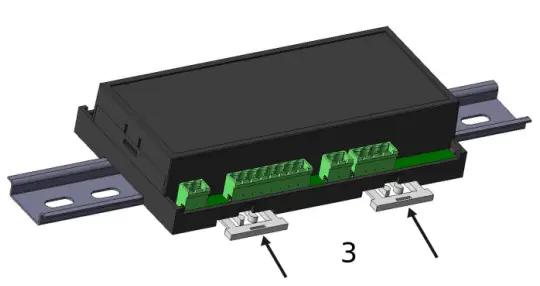 |
3- သော့ခတ်ထားသော အစိတ်အပိုင်းများကို အထဲသို့ တွန်းထည့်ပါ။ |
 |
4- မော်ဂျူးကိရိယာ၏ ထည့်သွင်းထားသောပုံသည် ဘယ်ဘက်ရှိ ပုံနှင့်တူသင့်သည်။ |
တပ်ဆင်ခြင်း။
- ဤထုတ်ကုန်ကို စတင်တပ်ဆင်ခြင်းမပြုမီ၊ အောက်ဖော်ပြပါ ညွှန်ကြားချက်လက်စွဲနှင့် သတိပေးချက်များကို ဂရုတစိုက်ဖတ်ရှုပါ။
- ပို့ဆောင်စဉ်အတွင်း ဖြစ်ပေါ်လာနိုင်သော ပျက်စီးဆုံးရှုံးမှုများအတွက် ဤထုတ်ကုန်၏ အမြင်အာရုံကို စစ်ဆေးခြင်းကို တပ်ဆင်ခြင်းမပြုမီ အကြံပြုအပ်ပါသည်။ အရည်အချင်းပြည့်မီသော စက်ပိုင်းဆိုင်ရာနှင့် လျှပ်စစ်ပညာရှင်များက ဤထုတ်ကုန်ကို တပ်ဆင်ကြောင်း သေချာစေရန်အတွက် သင့်တွင် တာဝန်ရှိပါသည်။
- လောင်ကျွမ်းနိုင်သော သို့မဟုတ် ပေါက်ကွဲနိုင်သော ဓာတ်ငွေ့ရှိသော လေထုထဲတွင် ယူနစ်ကို အသုံးမပြုပါနှင့်။
- ယူနစ်ကို နေရောင်ခြည် တိုက်ရိုက် သို့မဟုတ် အခြား အပူရင်းမြစ်သို့ မထုတ်ပါနှင့်။
- ထရန်စဖော်မာများ၊ မော်တာများ သို့မဟုတ် အနှောင့်အယှက်ဖြစ်စေသော စက်ပစ္စည်းများ (ဂဟေဆော်စက်များ) ကဲ့သို့သော သံလိုက်ကိရိယာများ၏ အနီးနားတွင် ယူနစ်ကို မထားပါ။
- စက်ပစ္စည်းပေါ်ရှိ လျှပ်စစ်ဆူညံသံများ၏ အကျိုးသက်ရောက်မှုကို လျှော့ချရန် Low Voltage line (အထူးသဖြင့် sensor input cable) wiring သည် high current နှင့် vol တို့ကို ခွဲခြားထားရပါမည်။tage လိုင်း။
- ဘောင်အတွင်း စက်ကိရိယာများ တပ်ဆင်စဉ်တွင်၊ သတ္တုအစိတ်အပိုင်းများပေါ်ရှိ ချွန်ထက်သောအစွန်းများသည် လက်များကို ဖြတ်တောက်မှုများ ဖြစ်စေနိုင်သည်၊ ကျေးဇူးပြု၍ သတိထားပါ။
- ထုတ်ကုန်၏တပ်ဆင်ခြင်းကို၎င်း၏ကိုယ်ပိုင် mounting cl ဖြင့်လုပ်ဆောင်ရပါမည်။amps.
- စက်ကို မသင့်လျော်သော cl ဖြင့် မတပ်ဆင်ပါနှင့်amp၎။ တပ်ဆင်နေစဉ်အတွင်း စက်ပစ္စည်းကို မချပါနှင့်။
- ဖြစ်နိုင်ပါက အကာအရံကြိုးကို အသုံးပြုပါ။ မြေပြင်လှည့်ပတ်မှုကို တားဆီးရန်အတွက် ဒိုင်းကို တစ်ဖက်တစ်ချက်တွင်သာ ခိုင်ခံ့ထားသင့်သည်။
- လျှပ်စစ်ရှော့ခ်ဖြစ်ခြင်း သို့မဟုတ် စက်ပစ္စည်းပျက်စီးခြင်းမှ ကာကွယ်ရန်၊ ဝိုင်ယာကြိုးများအားလုံးကို ပြီးမြောက်သည်အထိ စက်ပစ္စည်းသို့ ပါဝါမထည့်ပါနှင့်။
- ဒစ်ဂျစ်တယ် အထွက်များနှင့် ထောက်ပံ့ရေးချိတ်ဆက်မှုများကို တစ်ခုနှင့်တစ်ခု သီးခြားခွဲထုတ်ရန် ဒီဇိုင်းထုတ်ထားသည်။
- စက်ပစ္စည်းကို ခန့်အပ်ခြင်းမပြုမီ၊ အလိုရှိသောအသုံးပြုမှုနှင့်အညီ ဘောင်များကို သတ်မှတ်ရပါမည်။
- မပြည့်စုံခြင်း သို့မဟုတ် မှားယွင်းသောဖွဲ့စည်းပုံများသည် အန္တရာယ်ရှိနိုင်သည်။
- ယူနစ်အား ပုံမှန်အားဖြင့် ပါဝါခလုတ်၊ ဖျူးစ် သို့မဟုတ် ဆားကစ်ဖြတ်ခြင်းမရှိဘဲ ထောက်ပံ့ပေးသည်။ ဒေသန္တရ စည်းမျဉ်းများ လိုအပ်ချက်အရ ပါဝါခလုတ်၊ ဖျစ်နှင့် ဆားကစ် ဘရိတ်ကာကို အသုံးပြုပါ။
- အဆင့်သတ်မှတ်ထားသော ပါဝါထောက်ပံ့မှုပမာဏကိုသာ အသုံးပြုပါ။tage ကိရိယာများ ပျက်စီးခြင်းမှ ကာကွယ်ရန် ယူနစ်ဆီသို့။
- ဤယူနစ်တွင် ချို့ယွင်းမှု သို့မဟုတ် ချို့ယွင်းချက်ကြောင့် ဖြစ်ပေါ်လာသော ပြင်းထန်သော မတော်တဆမှုအန္တရာယ် ရှိပါက၊ စနစ်အား ပါဝါပိတ်ပြီး စက်ပစ္စည်းကို စနစ်မှ ချိတ်ဆက်မှုဖြုတ်ပါ။
- ဤယူနစ်ကို တပ်ဆင်ရန်၊ ပြုပြင်ရန် သို့မဟုတ် ပြုပြင်ရန် ဘယ်သောအခါမှ မကြိုးစားပါနှင့်။ Tampယူနစ်နှင့်တွဲနေခြင်းသည် ချို့ယွင်းမှု၊ လျှပ်စစ်ရှော့ခ်ဖြစ်ခြင်း သို့မဟုတ် မီးလောင်ကျွမ်းခြင်းတို့ကို ဖြစ်စေနိုင်သည်။
- ဤယူနစ်၏ ဘေးကင်းသော လည်ပတ်ဆောင်ရွက်မှုနှင့် ပတ်သက်သည့် မေးခွန်းများရှိပါက ကျွန်ုပ်တို့ထံ ဆက်သွယ်ပါ။
- ဤကိရိယာအား ဤညွှန်ကြားချက်လက်စွဲတွင် သတ်မှတ်ထားသည့်ပုံစံအတိုင်း အသုံးပြုရပါမည်။
ချိတ်ဆက်မှုများ
လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ
 |
ဂိတ် |
| + | |
|
– |
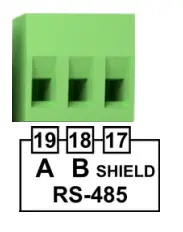
HMI ကိရိယာနှင့် ဆက်သွယ်မှု လင့်ခ်
 |
ဂိတ် |
| A | |
| B | |
| GND |
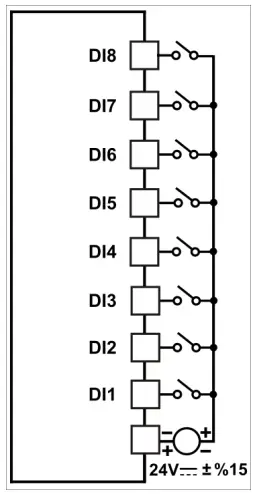
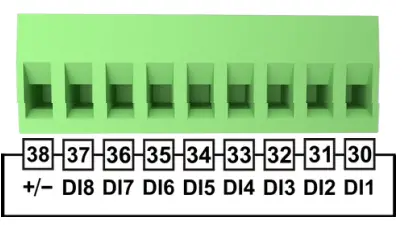
ဒစ်ဂျစ်တယ် သွင်းအားစုများ
|
|
ဂိတ် | မှတ်ချက် | ချိတ်ဆက်မှု Sheme |
| DI8 |
ဒစ်ဂျစ်တယ် သွင်းအားစုများ |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN / PNP
ဒစ်ဂျစ်တယ် သွင်းအားစုများ ရွေးချယ်ခြင်း။ |
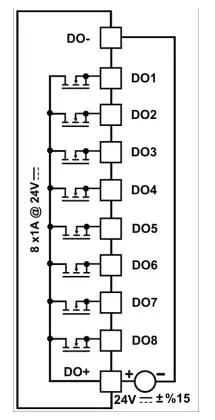
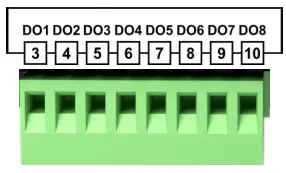
ဒစ်ဂျစ်တယ် ရုပ်ထွက်များ
|
|
ဂိတ် | မှတ်ချက် | ချိတ်ဆက်မှုအစီအစဉ် |
| C1 |
ဒစ်ဂျစ်တယ် ရုပ်ထွက်များ |
 |
|
| C2 | |||
| C3 | |||
| C4 | |||
| C5 | |||
| C6 | |||
| C7 | |||
| C8 |
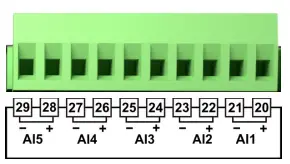
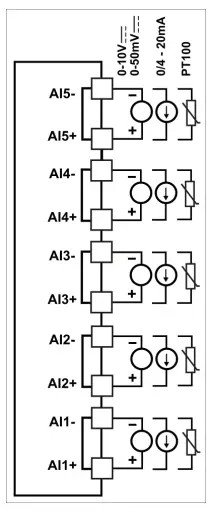
analog inputs
|
ဂိတ် | မှတ်ချက် | ချိတ်ဆက်မှုအစီအစဉ် |
| AI5- |
Analog ထည့်သွင်းခြင်း ၅ |
 |
|
| AI5+ | |||
| AI4- |
Analog ထည့်သွင်းခြင်း ၅ |
||
| AI4+ | |||
| AI3- |
Analog ထည့်သွင်းခြင်း ၅ |
||
| AI3+ | |||
| AI2- |
Analog ထည့်သွင်းခြင်း ၅ |
||
| AI2+ | |||
| AI1- |
Analog ထည့်သွင်းခြင်း ၅ |
||
| AI1+ |
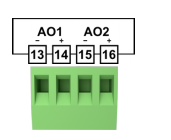
Analog Output များ
|
|
ဂိတ် | မှတ်ချက် | ချိတ်ဆက်မှုအစီအစဉ် |
|
AO+ |
Analog Output Supply |
 |
|
|
AO- |
|||
|
AO1 |
Analog Output များ |
||
|
AO2 |
နည်းပညာပိုင်းဆိုင်ရာအင်္ဂါရပ်များ
လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ
| လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | : | 24VDC |
| ခွင့်ပြုနိုင်သော အတိုင်းအတာ | : | 20.4 – 27.6 VDC |
| ပါဝါစားသုံးမှု | : | 3W |
ဒစ်ဂျစ်တယ် သွင်းအားစုများ
| ဒစ်ဂျစ်တယ် သွင်းအားစုများ | : | 8 ထည့်သွင်းပါ | |
| အမည်ခံထည့်သွင်းမှု Voltage | : | 24 VDC | |
|
ထည့်သွင်းမှု Voltage |
: |
Logic 0 အတွက် | Logic 1 အတွက် |
| < 5 VDC | > 10 VDC | ||
| Input Current | : | 6mA max ။ | |
| Input Impedance | : | 5.9 kΩ | |
| တုံ့ပြန်ချိန် | : | '0' မှ '1' 50ms | |
| Galvanic Isolation | : | 500 VAC 1 မိနစ် | |
မြန်နှုန်းမြင့် ကောင်တာထည့်သွင်းမှုများ
| HSC ထည့်သွင်းမှုများ | : | 2 ထည့်သွင်းမှု (HSC1: DI1 နှင့် DI2၊ HSC2: DI3 နှင့် DI4) | |
| အမည်ခံထည့်သွင်းမှု Voltage | : | 24 VDC | |
|
ထည့်သွင်းမှု Voltage |
: |
Logic 0 အတွက် | Logic 1 အတွက် |
| < 10 VDC | > 20 VDC | ||
| Input Current | : | 6mA max ။ | |
| Input Impedance | : | 5.6 kΩ | |
| ကြိမ်နှုန်းအပိုင်းအခြား | : | 15KHz အမြင့်ဆုံး single phase အတွက် 10KHz max. နှစ်ဆအဆင့်အတွက် | |
| Galvanic Isolation | : | 500 VAC 1 မိနစ် | |
ဒစ်ဂျစ်တယ် ရုပ်ထွက်များ
| ဒစ်ဂျစ်တယ် ရုပ်ထွက်များ | ၁ ရလဒ် | |
| Outputs Current | : | အများဆုံး 1 A (စုစုပေါင်း လက်ရှိ 8 A အများဆုံး။) |
| Galvanic Isolation | : | 500 VAC 1 မိနစ် |
| Short Circuit ကာကွယ်ရေး | : | ဟုတ်ကဲ့ |
analog inputs
| analog inputs | : | 5 ထည့်သွင်းပါ | |||
|
Input Impedance |
: |
PT-100 | ၁၅/၅၀-၊20mA | 0-10V | 0-50mV ဖြစ်သည် |
| စာ-၁၁oဗိုက် ၁oC | 100Ω | > 6.6kΩ | > 10MΩ | ||
| Galvanic Isolation | : | မရှိ | |||
| ဆုံးဖြတ်ချက် | : | 14 Bits | |||
| တိကျမှု | : | ±0,25% | |||
| Sampအချိန် | : | 250 ms | |||
| အဆင့်အတန်းညွှန်ပြခြင်း။ | : | ဟုတ်ကဲ့ | |||
Analog Output များ
|
Analog Output |
: |
၁ ရလဒ် | |
| 0/4-20mA | 0-10V | ||
| Galvanic Isolation | : | မရှိ | |
| ဆုံးဖြတ်ချက် | : | 12 Bits | |
| တိကျမှု | : | 1% အတိုင်းအတာအပြည့် | |
အတွင်းလိပ်စာ အဓိပ္ပါယ်ဖွင့်ဆိုချက်
ဆက်သွယ်ရေး ဆက်တင်များ-
| ကန့်သတ်ချက်များ | လိပ်စာ | ရွေးချယ်စရာများ | ပုံသေ |
| ID | 40001 | ၁၀-၁၀၀ | 1 |
| ဂုဏ်ယူပါတယ် | 40002 | 0- 1200 / 1- 2400 / 2- 4000 / 3- 9600 / 4- 19200 / 5- 38400 / ၊
၆- ၅၇၆၀၀ /၇- ၁၁၅၂၀၀ |
6 |
| ခဏရပ်ပါ။ | 40003 | 0- 1Bit / 1- 2Bit | 0 |
| PARITY | 40004 | 0- None / 1- Even / 2- အထူးအဆန်း | 0 |
စက်လိပ်စာများ:
| ဉာဏ် | ပုံစံ | Arange | လိပ်စာ | ရိုက်ပါ။ |
| ဒီဂျစ်တယ်ထည့်သွင်းမှု | Din | n: 0 – 7 | 10001 – 10008 | ဖတ်ပါ။ |
| ဒစ်ဂျစ်တယ် output ကို | ဒွန် | n: 0 – 7 | 1 – 8 | ဖတ်-ရေး |
| analog input ကို | AIn | n: 0 – 7 | 30004 – 30008 | ဖတ်ပါ။ |
| Analog Output | AOn | n: 0 – 1 | 40010 – 40011 | ဖတ်-ရေး |
| ဗားရှင်း* | (aaabbbbcccccccc)နည်းနည်း | n: 0 | 30001 | ဖတ်ပါ။ |
- မှတ်ချက် -ဤလိပ်စာရှိ a bit များသည် အဓိကဖြစ်သည်၊ b bits များသည် minor ဗားရှင်းနံပါတ်ဖြစ်သည်၊ c bits များသည် device type ကိုဖော်ပြသည်။
- Example- 30001 (0x2121)hex = (0010000100100001)bit မှဖတ်သောတန်ဖိုး၊
- a bits (001)bit = 1 (အဓိကဗားရှင်းနံပါတ်)
- b bits (00001)bit = 1 (အသေးစားဗားရှင်းနံပါတ်)
- c bits (00100001)bit = 33 (စက်ပစ္စည်းအမျိုးအစားများကို ဇယားတွင်ဖော်ပြထားပါသည်။) စက်ပစ္စည်းဗားရှင်း = V1.1
- ကိရိယာ အမျိုးအစား = 0-10V အင်နာလော့ရိုက်သွင်းမှု 0-10V အင်နာလော့အထွက်
စက်အမျိုးအစားများ-
| စက်အမျိုးအစား | တန်ဖိုး |
| PT100 Analog Input 4-20mA Analog Output | 0 |
| PT100 Analog Input 0-10V Analog Output | 1 |
| 4-20mA Analog Input 4-20mA Analog Output | 16 |
| 4-20mA Analog Input 0-10V Analog Output | 17 |
| 0-10V Analog Input 4-20mA Analog Output | 32 |
| 0-10V Analog Input 0-10V Analog Output | 33 |
| 0-50mV Analog Input 4-20mA Analog Output | 48 |
| 0-50mV Analog Input 0-10V Analog Output | 49 |
analog input အမျိုးအစားအလိုက် module မှဖတ်သောတန်ဖိုးများပြောင်းလဲခြင်းကိုအောက်ပါဇယားတွင်ဖော်ပြထားသည်-
| analog input ကို | တန်ဖိုးအတိုင်းအတာ | ကူးပြောင်းခြင်း။ အချက် | ExampPROOP တွင်ပြသထားသောတန်ဖိုး၏ le |
|
PT-100 -200° – 650° |
-2000 မှ 6500 |
x၁၆–1 |
Example-1- 100 အဖြစ်ဖတ်ထားသောတန်ဖိုးကို 10 သို့ပြောင်းသည်။oC. |
| Example-2- 203 အဖြစ်ဖတ်ထားသောတန်ဖိုးကို 20.3 သို့ပြောင်းသည်။oC. | |||
| 0 – 10V | 0 – 20000 | 0.5×10–3 | Example-1- 2500 အဖြစ် ဖတ်ထားသော တန်ဖိုးကို 1.25V သို့ ပြောင်းသည်။ |
| 0 – 50mV ဖြစ်သည် | 0 – 20000 | 2.5×10–3 | Example-1- 3000 အဖြစ် ဖတ်ရှုထားသော တန်ဖိုးကို 7.25mV သို့ ပြောင်းသည်။ |
|
၅/၅ – 20mA |
0 – 20000 |
0.1×10–3 |
Example-1- 3500 အဖြစ် ဖတ်ရှုထားသော တန်ဖိုးကို 7mA သို့ ပြောင်းသည်။ |
| Example-2- 1000 အဖြစ် ဖတ်ရှုထားသော တန်ဖိုးကို 1mA သို့ ပြောင်းသည်။ |
analog output အမျိုးအစားအလိုက် module တွင် တန်ဖိုးများပြောင်းလဲခြင်းကို အောက်ပါဇယားတွင်ဖော်ပြထားသည်-
| Analog Output | တန်ဖိုးအတိုင်းအတာ | ကူးပြောင်းခြင်း။ နှုန်းထား | ExampModules တွင်ရေးထားသောတန်ဖိုး၏ le |
| 0 – 10V | 0 – 10000 | x၁၆3 | Example-1- 1.25V အဖြစ်ရေးရမည့်တန်ဖိုးကို 1250 သို့ပြောင်းသည်။ |
| ၅/၅ – 20mA | 0 – 20000 | x၁၆3 | Example-1- 1.25mA အဖြစ်ရေးရမည့်တန်ဖိုးကို 1250 သို့ပြောင်းသည်။ |
Analog Input-Specific Address များ-
| ကန့်သတ်ချက် | AI1 | AI2 | AI3 | AI4 | AI5 | ပုံသေ |
| ဖွဲ့စည်းမှု ဘစ် | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| အနည်းဆုံး စကေးတန်ဖိုး | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| အများဆုံးစကေးတန်ဖိုး | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| အတိုင်းအတာတန်ဖိုး | 30064 | 30070 | 30076 | 30082 | 30088 | – |
Analog Input Configuration Bits-
| AI1 | AI2 | AI3 | AI4 | AI5 | ဖော်ပြချက် |
| 40123.0နည်းနည်း | 40133.0နည်းနည်း | 40143.0နည်းနည်း | 40153.0နည်းနည်း | 40163.0နည်းနည်း | 4-20mA/2-10V ရွေးရန်-
0 = 0-20 mA/0-10 V 1 = 4-20 mA/2-10 V |
Analog inputs များအတွက် အတိုင်းအတာတန်ဖိုးကို 4-20mA / 2-10V Selection configuration bit ၏ အခြေအနေအရ တွက်ချက်သည်။
Analog Output ၏ သီးခြားလိပ်စာများ-
| ကန့်သတ်ချက် | AO1 | AO2 | ပုံသေ |
| ထည့်သွင်းမှုအတွက် အနည်းဆုံး စကေးတန်ဖိုး | 40173 | 40183 | 0 |
| ထည့်သွင်းမှုအတွက် အများဆုံးစကေးတန်ဖိုး | 40174 | 40184 | 20000 |
| Output အတွက် အနည်းဆုံး စကေးတန်ဖိုး | 40175 | 40185 | 0 |
| အထွက်အတွက် အများဆုံး စကေးတန်ဖိုး | 40176 | 40186 | ၅/၅ |
| Analog Output Function
0- ကိုယ်တိုင်အသုံးပြုမှု 1- အထက်ဖော်ပြပါ စကေးတန်ဖိုးများကို အသုံးပြု၍ ၎င်းသည် အထွက်သို့ ထည့်သွင်းမှုကို ထင်ဟပ်စေသည်။ 2- ၎င်းသည် အထွက်အတွက် အနိမ့်ဆုံးနှင့် အမြင့်ဆုံး စကေးဘောင်များကို အသုံးပြု၍ အန်နာအထွက်ကို PID အထွက်အဖြစ် မောင်းနှင်သည်။ |
40177 | 40187 | 0 |
- analog output function parameter ကို 1 သို့မဟုတ် 2 ဟု သတ်မှတ်ပါက၊
- AI1 ကို A01 output အတွက် input အဖြစ်အသုံးပြုသည်။
- AI2 ကို A02 output အတွက် input အဖြစ်အသုံးပြုသည်။
- မဟုတ်- PT1 ထည့်သွင်းမှုများပါရှိသော မော်ဂျူးများတွင် အဝင်အထွက်မှ အထွက်အင်္ဂါရပ်ကို ရောင်ပြန်ဟပ်ခြင်း (Analoque Output Function = 100) ကို အသုံးမပြုနိုင်ပါ။
HSC(High-Speed Counter) ဆက်တင်များ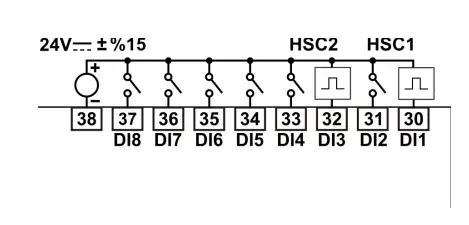
Single Phase Counter ချိတ်ဆက်မှု
- မြန်နှုန်းမြင့်ကောင်တာများသည် PROOP-IO စကင်န်ဖတ်နှုန်းများဖြင့် ထိန်းချုပ်၍မရသော မြန်နှုန်းမြင့်ဖြစ်ရပ်များကို ရေတွက်သည်။ မြန်နှုန်းမြင့်ကောင်တာ၏ အများဆုံးရေတွက်သည့်အကြိမ်ရေသည် ကုဒ်ဒါထည့်သွင်းမှုများအတွက် 10kHz နှင့် တန်ပြန်ထည့်သွင်းမှုများအတွက် 15kHz ဖြစ်သည်။
- အခြေခံကောင်တာ အမျိုးအစား ငါးမျိုး ရှိသည်- အတွင်း ဦးတည်ထိန်းချုပ်မှု ရှိသော single-phase ကောင်တာ၊ ပြင်ပ ဦးတည် ထိန်းချုပ်မှု ရှိသော single-phase counter များ၊ 2-phase inputs ရှိသော two-phase counter များ၊ A/B phase quadrature counter နှင့် frequency measurement အမျိုးအစား။
- မှတ်ချက် မုဒ်တိုင်းကို ကောင်တာတိုင်းက ပံ့ပိုးမပေးဘူး။ ကြိမ်နှုန်းတိုင်းတာခြင်းအမျိုးအစားမှလွဲ၍ အမျိုးအစားတစ်ခုစီကို သင်အသုံးပြုနိုင်သည်- ပြန်လည်သတ်မှတ်ခြင်း သို့မဟုတ် စတင်ထည့်သွင်းခြင်းမရှိဘဲ၊ ပြန်လည်သတ်မှတ်ခြင်းနှင့် စတင်ခြင်းမရှိဘဲ သို့မဟုတ် စတင်ခြင်းနှင့် ပြန်လည်သတ်မှတ်ခြင်း နှစ်ခုစလုံးဖြင့် ထည့်သွင်းနိုင်သည်။
- ပြန်လည်သတ်မှတ်ခြင်းထည့်သွင်းခြင်းကို သင်စဖွင့်သောအခါ၊ ၎င်းသည် လက်ရှိတန်ဖိုးကိုရှင်းလင်းပြီး ပြန်လည်သတ်မှတ်မှုကို ပိတ်သည်အထိ ရှင်းရှင်းလင်းလင်း ထိန်းထားသည်။
- စတင်ထည့်သွင်းမှုကို စတင်သောအခါ၊ ကောင်တာအား ရေတွက်နိုင်စေပါသည်။ စတင်ခြင်းကို ပိတ်ထားစဉ်၊ ကောင်တာ၏ လက်ရှိတန်ဖိုးကို အဆက်မပြတ်ကျင်းပနေပြီး နာရီချိန်ကိုက်ခြင်းများကို လျစ်လျူရှုထားသည်။
- စတင်မလုပ်ဆောင်ချိန်တွင် ပြန်လည်သတ်မှတ်ခြင်းကို အသက်သွင်းပါက၊ ပြန်လည်သတ်မှတ်ခြင်းကို လျစ်လျူရှုပြီး လက်ရှိတန်ဖိုးကို ပြောင်းလဲမည်မဟုတ်ပါ။ ပြန်လည်သတ်မှတ်မှုထည့်သွင်းမှုသည် အသက်ဝင်နေချိန်တွင် စတင်ထည့်သွင်းမှုသည် တက်ကြွနေပါက၊ လက်ရှိတန်ဖိုးကို ရှင်းလင်းသွားမည်ဖြစ်သည်။
| ကန့်သတ်ချက်များ | လိပ်စာ | ပုံသေ |
| HSC1 ဖွဲ့စည်းမှုပုံစံနှင့် မုဒ်ကို ရွေးချယ်ပါ* | 40012 | 0 |
| HSC2 ဖွဲ့စည်းမှုပုံစံနှင့် မုဒ်ကို ရွေးချယ်ပါ* | 40013 | 0 |
| HSC1 အသစ် လက်ရှိတန်ဖိုး (သိသာထင်ရှားသော အနည်းဆုံး 16 byte) | 40014 | 0 |
| HSC1 အသစ် လက်ရှိတန်ဖိုး (အထူးခြားဆုံး 16 byte) | 40015 | 0 |
| HSC2 အသစ် လက်ရှိတန်ဖိုး (သိသာထင်ရှားသော အနည်းဆုံး 16 byte) | 40016 | 0 |
| HSC2 အသစ် လက်ရှိတန်ဖိုး (အထူးခြားဆုံး 16 byte) | 40017 | 0 |
| HSC1 လက်ရှိတန်ဖိုး (သိသာထင်ရှားဆုံး 16 byte) | 30010 | 0 |
| HSC1 လက်ရှိတန်ဖိုး (အထူးခြားဆုံး 16 byte) | 30011 | 0 |
| HSC2 လက်ရှိတန်ဖိုး (သိသာထင်ရှားဆုံး 16 byte) | 30012 | 0 |
| HSC2 လက်ရှိတန်ဖိုး (အထူးခြားဆုံး 16 byte) | 30013 | 0 |
မှတ်ချက် - ဤကန့်သတ်ချက်;
- သိသာထင်ရှားသော ဘိုက်အနည်းဆုံးမှာ မုဒ် ကန့်သတ်ချက်ဖြစ်သည်။
- အထင်ရှားဆုံး byte မှာ Configuration parameter ဖြစ်သည်။
HSC Configuration ဖော်ပြချက်-
| HSC1 | HSC2 | ဖော်ပြချက် |
| 40012.8နည်းနည်း | 40013.8နည်းနည်း | ပြန်လည်သတ်မှတ်ရန်အတွက် တက်ကြွသောအဆင့်ထိန်းချုပ်မှုဘစ်-
0 = ပြန်လည်သတ်မှတ်ခြင်းသည် တက်ကြွမှုနည်းသည် 1 = ပြန်လည်သတ်မှတ်မှုသည် တက်ကြွမှုမြင့်မားသည်။ |
| 40012.9နည်းနည်း | 40013.9နည်းနည်း | Start အတွက် Active အဆင့်ထိန်းချုပ်မှုဘစ်-
0 = Start is active low 1 = Start is active high |
| 40012.10နည်းနည်း | 40013.10နည်းနည်း | လမ်းညွှန်ထိန်းချုပ်မှု bit ကို ရေတွက်ခြင်း-
0 = Count down 1 = ရေတွက်ခြင်း။ |
| 40012.11နည်းနည်း | 40013.11နည်းနည်း | HSC တွင် လက်ရှိတန်ဖိုးအသစ်ကို ရေးပါ။
0 = အပ်ဒိတ်မရှိပါ 1 = လက်ရှိတန်ဖိုးကို အပ်ဒိတ်လုပ်ပါ။ |
| 40012.12နည်းနည်း | 40013.12နည်းနည်း | HSC ကိုဖွင့်ပါ-
0 = HSC ကိုပိတ်ရန် 1 = HSC ကိုဖွင့်ပါ။ |
| 40012.13နည်းနည်း | 40013.13နည်းနည်း | အရံ |
| 40012.14နည်းနည်း | 40013.14နည်းနည်း | အရံ |
| 40012.15နည်းနည်း | 40013.15နည်းနည်း | အရံ |
HSC မုဒ်များ-
| မုဒ် | ဖော်ပြချက် | သွင်းအားစုများ | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | Internal Direction ဖြင့် Single Phase Counter | နာရီ | |||
| 1 | နာရီ | ပြန်လည်သတ်မှတ်ပါ။ | |||
| 2 | နာရီ | ပြန်လည်သတ်မှတ်ပါ။ | စတင်ပါ။ | ||
| 3 | ပြင်ပဦးတည်ချက်ဖြင့် Single Phase Counter | နာရီ | ဦးတည်ချက် | ||
| 4 | နာရီ | ဦးတည်ချက် | ပြန်လည်သတ်မှတ်ပါ။ | ||
| 5 | နာရီ | ဦးတည်ချက် | ပြန်လည်သတ်မှတ်ပါ။ | စတင်ပါ။ | |
| 6 | 2 နာရီထည့်သွင်းမှုနှင့်အတူ Phase Counter | နာရီတက် | နာရီအောက် | ||
| 7 | နာရီတက် | နာရီအောက် | ပြန်လည်သတ်မှတ်ပါ။ | ||
| 8 | နာရီတက် | နာရီအောက် | ပြန်လည်သတ်မှတ်ပါ။ | စတင်ပါ။ | |
| 9 | A/B Phase Encoder ကောင်တာ | နာရီ A | နာရီ B | ||
| 10 | နာရီ A | နာရီ B | ပြန်လည်သတ်မှတ်ပါ။ | ||
| 11 | နာရီ A | နာရီ B | ပြန်လည်သတ်မှတ်ပါ။ | စတင်ပါ။ | |
| 12 | အရံ | ||||
| 13 | အရံ | ||||
| 14 | ကာလအတိုင်းအတာ (10 μs s ဖြင့်ampကြာချိန်) | ကာလထည့်သွင်းခြင်း။ | |||
| 15 | ကောင်တာ/
ကာလ Ölçümü (1ms sampကြာချိန်) |
မက်တယ်။ 15 kHz | မက်တယ်။ 15 kHz | မက်တယ်။ 1 kHz | မက်တယ်။ 1 kHz |
မုဒ်အတွက် သီးသန့်လိပ်စာများ 15:
| ကန့်သတ်ချက် | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | ပုံသေ |
| ဖွဲ့စည်းမှု ဘစ် | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| ကာလပြန်လည်သတ်မှတ်ချိန် (1-1000 sn) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| လျှော့စျေး 16-ဘစ်တန်ဖိုးကို တန်ပြန် | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| မြင့်မားသောမှာယူမှု 16-ဘစ်တန်ဖိုးကို တန်ပြန် | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| မှာယူမှုနည်းသောကာလ 16-bit တန်ဖိုး(ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| အမြင့်ဆုံးမှာယူမှု 16-bit တန်ဖိုး(ms) ကာလ | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
ဖွဲ့စည်းမှု အပိုင်းများ-
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | ဖော်ပြချက် |
| 40193.0နည်းနည်း | 40201.0နည်းနည်း | 40209.0နည်းနည်း | 40217.0နည်းနည်း | 40225.0နည်းနည်း | 40233.0နည်းနည်း | 40241.0နည်းနည်း | 40249.0နည်းနည်း | Dix ဘစ်ကိုဖွင့်ရန်- 0 = DIx ဖွင့်ရန် 1 = DIx ကို ပိတ်သည်။ |
|
40193.1နည်းနည်း |
40201.1နည်းနည်း |
40209.1နည်းနည်း |
40217.1နည်းနည်း |
40225.1နည်းနည်း |
40233.1နည်းနည်း |
40241.1နည်းနည်း |
40249.1နည်းနည်း |
လမ်းကြောင်းကို ရေတွက်ခြင်း-
0 = Count down 1 = ရေတွက်ခြင်း။ |
| 40193.2နည်းနည်း | 40201.2နည်းနည်း | 40209.2နည်းနည်း | 40217.2နည်းနည်း | 40225.2နည်းနည်း | 40233.2နည်းနည်း | 40241.2နည်းနည်း | 40249.2နည်းနည်း | အရံ |
| 40193.3နည်းနည်း | 40201.3နည်းနည်း | 40209.3နည်းနည်း | 40217.3နည်းနည်း | 40225.3နည်းနည်း | 40233.3နည်းနည်း | 40241.3နည်းနည်း | 40249.3နည်းနည်း | DIx count bit ကို ပြန်လည်သတ်မှတ်သည်-
1 = DIx တန်ပြန်ကို ပြန်လည်သတ်မှတ်ပါ။ |
PID ဆက်တင်များ
module ရှိ analog input တစ်ခုစီအတွက် သတ်မှတ်ထားသော ဘောင်များကို သတ်မှတ်ခြင်းဖြင့် PID သို့မဟုတ် On/Off ထိန်းချုပ်မှုအင်္ဂါရပ်ကို အသုံးပြုနိုင်သည်။ PID သို့မဟုတ် ON/OFF လုပ်ဆောင်ချက်ပါရှိသော analog input သည် သက်ဆိုင်ရာ ဒစ်ဂျစ်တယ်အထွက်ကို ထိန်းချုပ်သည်။ PID သို့မဟုတ် ON/OFF လုပ်ဆောင်ချက်ကို အသက်သွင်းထားသည့် ချန်နယ်နှင့် ဆက်စပ်နေသော ဒစ်ဂျစ်တယ်အထွက်အား လူကိုယ်တိုင် မောင်းနှင်၍မရပါ။
- Analog input AI1 သည် ဒစ်ဂျစ်တယ်အထွက် DO1 ကို ထိန်းချုပ်သည်။
- Analog input AI2 သည် ဒစ်ဂျစ်တယ်အထွက် DO2 ကို ထိန်းချုပ်သည်။
- Analog input AI3 သည် ဒစ်ဂျစ်တယ်အထွက် DO3 ကို ထိန်းချုပ်သည်။
- Analog input AI4 သည် ဒစ်ဂျစ်တယ်အထွက် DO4 ကို ထိန်းချုပ်သည်။
- Analog input AI5 သည် ဒစ်ဂျစ်တယ်အထွက် DO5 ကို ထိန်းချုပ်သည်။
PID ကန့်သတ်ချက်များ-
| ကန့်သတ်ချက် | ဖော်ပြချက် |
| PID အသက်ဝင်သည်။ | PID သို့မဟုတ် ON/OFF လုပ်ဆောင်ချက်ကို ဖွင့်ပါ။
0 = လူကိုယ်တိုင်အသုံးပြုမှု 1 = PID တက်ကြွမှု 2 = ON/OFF လုပ်ဆောင်နေပါသည်။ |
| တန်ဖိုးသတ်မှတ်ပါ။ | ၎င်းသည် PID သို့မဟုတ် ON/OFF လုပ်ဆောင်ချက်အတွက် သတ်မှတ်တန်ဖိုးဖြစ်သည်။ PT100 တန်ဖိုးများသည် ထည့်သွင်းမှုအတွက် -200.0 နှင့် 650.0 အကြား၊ အခြားအမျိုးအစားများအတွက် 0 နှင့် 20000 ကြားရှိနိုင်ပါသည်။ |
| အော့ဖ်ဆက်သတ်မှတ်ပါ။ | ၎င်းကို PID လုပ်ဆောင်ချက်တွင် သတ်မှတ် Offset တန်ဖိုးအဖြစ် အသုံးပြုသည်။ ၎င်းသည် -325.0 နှင့် တန်ဖိုးများကြားတွင် ယူနိုင်သည်။
PT325.0 ထည့်သွင်းမှုအတွက် 100၊ အခြားအမျိုးအစားများအတွက် -10000 မှ 10000။ |
| Hysteresis ကို သတ်မှတ်ပါ။ | ၎င်းကို ON/OFF လည်ပတ်မှုတွင် Set Hysteresis တန်ဖိုးအဖြစ် အသုံးပြုသည်။ အကြားတန်ဖိုးများယူနိုင်သည်။
PT325.0 ထည့်သွင်းမှုအတွက် -325.0 နှင့် 100၊ အခြားအမျိုးအစားများအတွက် -10000 မှ 10000။ |
| အနည်းဆုံး စကေးတန်ဖိုး | Working scale သည် အနိမ့်ဆုံး limit value ဖြစ်သည်။ PT100 တန်ဖိုးများသည် -200.0 နှင့် အကြားရှိနိုင်သည်။
ထည့်သွင်းမှုအတွက် 650.0၊ 0 နှင့် အခြားအမျိုးအစားများအတွက် 20000။ |
| အများဆုံးစကေးတန်ဖိုး | Working scale သည် အထက်ကန့်သတ်ချက်တန်ဖိုးဖြစ်သည်။ PT100 တန်ဖိုးများသည် -200.0 နှင့် အကြားရှိနိုင်သည်။
ထည့်သွင်းမှုအတွက် 650.0၊ 0 နှင့် အခြားအမျိုးအစားများအတွက် 20000။ |
| အပူပေးခြင်း အချိုးကျတန်ဖိုး | အပူအတွက် အချိုးကျတန်ဖိုး။ ၎င်းသည် 0.0 နှင့် 100.0 ကြား တန်ဖိုးများကို ယူနိုင်သည်။ |
| အပူပေးသည့်တန်ဖိုး | အပူအတွက် အဓိကတန်ဖိုး။ ၎င်းသည် 0 နှင့် 3600 စက္ကန့်အကြား တန်ဖိုးများ ကြာနိုင်သည်။ |
| အပူပေးခြင်း ဆင်းသက်လာတန်ဖိုး | အပူအတွက် ဆင်းသက်လာတန်ဖိုး။ ၎င်းသည် 0.0 နှင့် 999.9 ကြား တန်ဖိုးများကို ယူနိုင်သည်။ |
| Cooling Proportional Value | အအေးအတွက် အချိုးကျတန်ဖိုး။ ၎င်းသည် 0.0 နှင့် 100.0 ကြား တန်ဖိုးများကို ယူနိုင်သည်။ |
| Cooling Integral တန်ဖိုး | အအေးအတွက် အဓိကတန်ဖိုး။ ၎င်းသည် 0 နှင့် 3600 စက္ကန့်အကြား တန်ဖိုးများ ကြာနိုင်သည်။ |
| Cooling Derivative Value | အအေးခံခြင်းတန်ဖိုး။ ၎င်းသည် 0.0 နှင့် 999.9 ကြား တန်ဖိုးများကို ယူနိုင်သည်။ |
| အထွက်ကာလ | Output သည် control period ဖြစ်သည်။ ၎င်းသည် တန်ဖိုးများကို 1 စက္ကန့်မှ 150 စက္ကန့်ကြား ကြာနိုင်သည်။ |
| အပူ/အအေးကို ရွေးချယ်ပါ။ | PID သို့မဟုတ် ON/OFF အတွက် ချန်နယ်လည်ပတ်မှုကို သတ်မှတ်သည်။ 0 = အပူပေးခြင်း 1 = အအေးခံခြင်း။ |
| အော်တိုညှိ | PID အတွက် Auto Tune လုပ်ဆောင်ချက်ကို စတင်သည်။
0 = Auto Tune passive 1 = Auto Tune တက်ကြွမှု |
- မှတ်ချက် - အစက်ပါသော အမှတ်အသားရှိ တန်ဖိုးများအတွက်၊ Modbus ဆက်သွယ်မှုတွင် ဤကန့်သတ်ချက်များ၏ အစစ်အမှန်တန်ဖိုး ၁၀ ဆကို အသုံးပြုပါသည်။
PID Modbus လိပ်စာများ-
| ကန့်သတ်ချက် | AI1
လိပ်စာ |
AI2
လိပ်စာ |
AI3
လိပ်စာ |
AI4
လိပ်စာ |
AI5
လိပ်စာ |
ပုံသေ |
| PID အသက်ဝင်သည်။ | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| တန်ဖိုးသတ်မှတ်ပါ။ | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| အော့ဖ်ဆက်သတ်မှတ်ပါ။ | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| အာရုံခံ Offset | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| Hysteresis ကို သတ်မှတ်ပါ။ | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| အနည်းဆုံး စကေးတန်ဖိုး | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| အများဆုံးစကေးတန်ဖိုး | 40028 | 40048 | 40068 | 40088 | 40108 | ၅/၅ |
| အပူပေးခြင်း အချိုးကျတန်ဖိုး | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| အပူပေးသည့်တန်ဖိုး | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| အပူပေးခြင်း ဆင်းသက်လာတန်ဖိုး | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| Cooling Proportional Value | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| Cooling Integral တန်ဖိုး | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| Cooling Derivative Value | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| အထွက်ကာလ | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| အပူ/အအေးကို ရွေးချယ်ပါ။ | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| အော်တိုညှိ | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| PID လက်ငင်းအထွက်တန်ဖိုး (%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| PID Status Bits | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| PID Configuration Bits | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| Auto Tune Status Bits | 30026 | 30034 | 30042 | 30050 | 30058 | – |
PID ဖွဲ့စည်းမှုဘစ်များ-
| AI1 လိပ်စာ | AI2 လိပ်စာ | AI3 လိပ်စာ | AI4 လိပ်စာ | AI5 လိပ်စာ | ဖော်ပြချက် |
| 40039.0နည်းနည်း | 40059.0နည်းနည်း | 40079.0နည်းနည်း | 40099.0နည်းနည်း | 40119.0နည်းနည်း | PID ခေတ္တရပ်ရန်-
0 = PID လုပ်ဆောင်ချက်ကို ဆက်လက်လုပ်ဆောင်သည်။ 1 = PID ကို ရပ်လိုက်ပြီး အထွက်ကို ပိတ်ထားသည်။ |
PID အခြေအနေ ဘစ်များ-
| AI1 လိပ်စာ | AI2 လိပ်စာ | AI3 လိပ်စာ | AI4 လိပ်စာ | AI5 လိပ်စာ | ဖော်ပြချက် |
| 30025.0နည်းနည်း | 30033.0နည်းနည်း | 30041.0နည်းနည်း | 30049.0နည်းနည်း | 30057.0နည်းနည်း | PID တွက်ချက်မှု အခြေအနေ-
0 = PID တွက်ချက်ခြင်း 1 = PID ကို မတွက်ချက်ပါ။ |
|
30025.1နည်းနည်း |
30033.1နည်းနည်း |
30041.1နည်းနည်း |
30049.1နည်းနည်း |
30057.1နည်းနည်း |
ပေါင်းစပ်တွက်ချက်မှု အခြေအနေ-
0 = Calculating Integral 1 = Integral ကို တွက်ချက်ခြင်းမဟုတ်ပါ။ |
အလိုအလျောက် ချိန်ညှိမှု အခြေအနေ ဘစ်များ-
| AI1 လိပ်စာ | AI2 လိပ်စာ | AI3 လိပ်စာ | AI4 လိပ်စာ | AI5 လိပ်စာ | ဖော်ပြချက် |
| 30026.0နည်းနည်း | 30034.0နည်းနည်း | 30042.0နည်းနည်း | 30050.0နည်းနည်း | 30058.0နည်းနည်း | အော်တိုချိန်ညှိခြင်း ပထမအဆင့် အခြေအနေ-
1 = ပထမအဆင့် တက်ကြွသည်။ |
| 30026.1နည်းနည်း | 30034.1နည်းနည်း | 30042.1နည်းနည်း | 30050.1နည်းနည်း | 30058.1နည်းနည်း | Auto Tune ဒုတိယအဆင့် အခြေအနေကို
1 = ဒုတိယအဆင့်သည် အသက်ဝင်သည်။ |
| 30026.2နည်းနည်း | 30034.2နည်းနည်း | 30042.2နည်းနည်း | 30050.2နည်းနည်း | 30058.2နည်းနည်း | Auto Tune တတိယအဆင့် အခြေအနေ-
1 = တတိယအဆင့်သည် အသက်ဝင်သည်။ |
| 30026.3နည်းနည်း | 30034.3နည်းနည်း | 30042.3နည်းနည်း | 30050.3နည်းနည်း | 30058.3နည်းနည်း | အလိုအလျောက် ချိန်ညှိခြင်း နောက်ဆုံးအဆင့် အခြေအနေ-
1 = Auto Tune ပြီးပါပြီ။ |
| 30026.4နည်းနည်း | 30034.4နည်းနည်း | 30042.4နည်းနည်း | 30050.4နည်းနည်း | 30058.4နည်းနည်း | အလိုအလျောက်ချိန်ညှိချိန်လွန်မှု အမှားအယွင်း-
1 = အချိန်ကုန်သွားသည် ။ |
ပုံသေအားဖြင့် ဆက်သွယ်ရေးဆက်တင်များကို ထည့်သွင်းခြင်း။
ဗားရှင်း V01 ပါသောကတ်များအတွက်;
- I/O Module စက်ပစ္စည်းကို ပါဝါပိတ်ပါ။
- ကိရိယာ၏အဖုံးကို ရုတ်သိမ်းပါ။
- ပုံတွင်ပြထားသည့် socket ပေါ်ရှိ short circuit pin 2 နှင့် 4 ။
- အားဖြည့်ပေးခြင်းဖြင့် အနည်းဆုံး 2 စက္ကန့်စောင့်ပါ။ 2 စက္ကန့်ကြာပြီးနောက်၊ ဆက်သွယ်ရေးဆက်တင်များသည် မူရင်းသို့ပြန်သွားပါမည်။
- ဝါယာရှော့ကိုဖယ်ရှားပါ။
- စက်အဖုံးကိုပိတ်ပါ။
ဗားရှင်း V02 ပါသောကတ်များအတွက်;
- I/O Module စက်ပစ္စည်းကို ပါဝါပိတ်ပါ။
- ကိရိယာ၏အဖုံးကို ရုတ်သိမ်းပါ။
- ပုံတွင်ပြထားသည့် socket တွင် jumper ကိုတပ်ပါ။
- အားဖြည့်ပေးခြင်းဖြင့် အနည်းဆုံး 2 စက္ကန့်စောင့်ပါ။ 2 စက္ကန့်ကြာပြီးနောက်၊ ဆက်သွယ်ရေးဆက်တင်များသည် မူရင်းသို့ပြန်သွားပါမည်။
- Jumper ကိုဖယ်ရှားပါ။
- စက်အဖုံးကိုပိတ်ပါ။
Modbus Slave လိပ်စာ ရွေးချယ်မှု
slave လိပ်စာကို modbus ၏လိပ်စာ 1 တွင် 255 မှ 40001 အထိ သတ်မှတ်နိုင်သည်။ ထို့အပြင်၊ ကတ်ပေါ်ရှိ Dip Switch ကို V02 ကတ်များတွင် slave လိပ်စာကို သတ်မှတ်ရန် အသုံးပြုနိုင်သည်။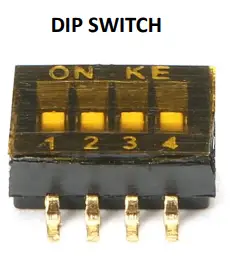
| DIP SWITCH | ||||
| ကျွန် ID | 1 | 2 | 3 | 4 |
| မဟုတ်ဘူး ၁ | ON | ON | ON | ON |
| 1 | ပိတ်ပါ။ | ON | ON | ON |
| 2 | ON | ပိတ်ပါ။ | ON | ON |
| 3 | ပိတ်ပါ။ | ပိတ်ပါ။ | ON | ON |
| 4 | ON | ON | ပိတ်ပါ။ | ON |
| 5 | ပိတ်ပါ။ | ON | ပိတ်ပါ။ | ON |
| 6 | ON | ပိတ်ပါ။ | ပိတ်ပါ။ | ON |
| 7 | ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ | ON |
| 8 | ON | ON | ON | ပိတ်ပါ။ |
| 9 | ပိတ်ပါ။ | ON | ON | ပိတ်ပါ။ |
| 10 | ON | ပိတ်ပါ။ | ON | ပိတ်ပါ။ |
| 11 | ပိတ်ပါ။ | ပိတ်ပါ။ | ON | ပိတ်ပါ။ |
| 12 | ON | ON | ပိတ်ပါ။ | ပိတ်ပါ။ |
| 13 | ပိတ်ပါ။ | ON | ပိတ်ပါ။ | ပိတ်ပါ။ |
| 14 | ON | ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ |
| 15 | ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ | ပိတ်ပါ။ |
- မှတ်ချက် 1- Dip Switches အားလုံးကို ဖွင့်ထားသည့်အခါ Modbus register 40001 တွင် value ကို slave address အဖြစ် အသုံးပြုပါသည်။
အာမခံ
ဤထုတ်ကုန်သည် ဝယ်သူထံသို့ ပို့ဆောင်သည့်နေ့မှစပြီး နှစ်နှစ်တာကာလအတွင်း ပစ္စည်းများနှင့် လက်ရာများတွင် ချို့ယွင်းချက်မရှိကြောင်း အာမခံပါသည်။ အာမခံသည် ထုတ်လုပ်သူ၏ရွေးချယ်မှုအရ ချို့ယွင်းနေသောယူနစ်ကို ပြုပြင်ရန် သို့မဟုတ် အစားထိုးရန်အတွက် ကန့်သတ်ချက်ရှိသည်။ ထုတ်ကုန်ကို ပြောင်းလဲခြင်း၊ အလွဲသုံးစားလုပ်ခြင်း၊ ဖျက်သိမ်းခြင်း သို့မဟုတ် အခြားနည်းဖြင့် အလွဲသုံးစားလုပ်ပါက ဤအာမခံချက်သည် ပျက်ပြယ်ပါသည်။
ထိန်းသိမ်းခြင်း။
ပြုပြင်မှုများကို လေ့ကျင့်သင်ကြားပြီး အထူးပြုဝန်ထမ်းများမှသာ လုပ်ဆောင်သင့်ပါသည်။ အတွင်းပိုင်း အစိတ်အပိုင်းများ မဝင်ရောက်မီ စက်ပစ္စည်းသို့ ပါဝါဖြတ်ပါ။ ဟိုက်ဒရိုကာဗွန်အခြေခံသောအရည်များ (ဓာတ်ဆီ၊ Trichlorethylene စသည်) ဖြင့် အိတ်ကို မသန့်ရှင်းပါနှင့်။ ဤပျော်ရည်များကိုအသုံးပြုခြင်းသည် စက်၏စက်ပိုင်းဆိုင်ရာယုံကြည်စိတ်ချရမှုကို လျှော့ချနိုင်သည်။
အခြားအချက်အလက်များ
- ထုတ်လုပ်သူ အချက်အလက်-
- Emko Elektronik Sanayi နှင့် Ticaret A.Ş။
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/တူရကီ
- ဖုန်း : (၀၃) ၉၇၃၀ ၆၀၀၀
- ဖက်စ် (၀၃) ၉၇၃၀ ၆၀၀၀
- ပြုပြင်ထိန်းသိမ်းမှု ဝန်ဆောင်မှု အချက်အလက်-
- Emko Elektronik Sanayi နှင့် Ticaret A.Ş။
- Bursa Organize Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BURSA/တူရကီ
- ဖုန်း : (၀၃) ၉၇၃၀ ၆၀၀၀
- ဖက်စ် (၀၃) ၉၇၃၀ ၆၀၀၀
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
EMKO PROOP Input သို့မဟုတ် Output Module [pdf] အသုံးပြုသူလက်စွဲ PROOP၊ Input သို့မဟုတ် Output Module၊ PROOP Input သို့မဟုတ် Output Module၊ Input Module၊ Output Module၊ Module |



