![]() HEDS-9940PRGEVB
HEDS-9940PRGEVB
အကဲဖြတ်ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းကိရိယာအစုံ
အသုံးပြုသူလမ်းညွှန်
ဗားရှင်း 1.0
HEDS-9940PRGEVB အကဲဖြတ်ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းကိရိယာအစုံ
မူပိုင်ခွင့် © 2024 Broadcom ။ မူပိုင်ခွင့်ကိုလက်ဝယ်ထားသည်။ “Broadcom” ဟူသော ဝေါဟာရသည် Broadcom Inc. နှင့်/သို့မဟုတ် ၎င်း၏ လုပ်ငန်းခွဲများကို ရည်ညွှန်းသည်။ ပိုမိုသိရှိလိုပါက, သို့သွားပါ။ www.broadcom.com. ဤနေရာတွင် ကိုးကားထားသော ကုန်အမှတ်တံဆိပ်များ၊ ကုန်သွယ်မှုအမည်များ၊ ဝန်ဆောင်မှုအမှတ်အသားများနှင့် လိုဂိုများအားလုံးသည် ၎င်းတို့၏ သက်ဆိုင်ရာကုမ္ပဏီများနှင့် သက်ဆိုင်ပါသည်။
Broadcom သည်ယုံကြည်စိတ်ချရမှု၊ လုပ်ဆောင်ချက် (သို့) ဒီဇိုင်းကိုတိုးတက်စေရန်ဤနေရာတွင်မည်သည့်ထုတ်ကုန်သို့ဒေတာကိုမဆိုအသိပေးခြင်းမရှိဘဲအပြောင်းအလဲလုပ်ပိုင်ခွင့်ရှိသည်။ Broadcom မှပြင်ဆင်ထားသောသတင်းအချက်အလက်များသည်တိကျပြီးယုံကြည်စိတ်ချရသောဟုယုံကြည်သည်။ သို့ရာတွင် Broadcom အပလီကေးရှင်းမှရယူခြင်းသို့မဟုတ်အသုံးပြုခြင်းမှပေါ်ပေါက်လာသောမည်သည့်တာဝန်ယူမှုကိုမဆို၊ ဤတွင်ဖော်ပြထားသောမည်သည့်ကုန်ပစ္စည်းသို့မဟုတ်ပတ် ၀ န်းကျင်ကိုမဆိုအသုံးချခြင်း၊ ၎င်းသည်၎င်း၏မူပိုင်ခွင့်အခွင့်အရေးများနှင့်အခြားသူများ၏အခွင့်အရေးများအောက်တွင်မည်သည့်လိုင်စင်ကိုမျှမဖော်ပြချေ။
HEDS-9940EVB အကဲဖြတ်ဘုတ်အဖွဲ့
1.1 အပေါ်နှင့်အောက်ခြေ Views
ပုံ 1- အောက်ခြေ View PCB ၏

ပုံ 2- အပေါ် View PCB ၏

PCB ရှိ ပိုးထည်စခရင်-ပုံနှိပ်လမ်းညွှန်လိုင်းသည် မတူညီသော ROP (CPR) တေးသွားတစ်ခုစီအတွက် ကုဒ်ဘီးအစွန်း (အပြင်ဘက်အချင်း) ကို ပံ့ပိုးပေးရန်အတွက် ကူညီပေးသည်။ ၎ampကုဒ်ဒါကို 500 CPR လမ်းကြောင်းနှင့် လိုက်လျောညီထွေဖြစ်စေမည့် အနေအထားကို ပြသသည့် le diagram ကို ပုံ 3 တွင် ပြထားသည်။
ပုံ 3: Sample Encoder ကို 500 CPR လမ်းကြောင်း (HEDS-9940EVB1/HEDS-9940PRGEVB1) သို့ ချိန်ညှိထားသည်။

ပုံ 4: Sampကုဒ်ဘီးကို ကိုးကား၍ အကဲဖြတ်ဘုတ်ကို တပ်ဆင်ခြင်း။

ရွေးချယ်စရာများကို ရွေးပါ။
ဇယား 1- AEDR-9940 198.4375 LPI အတွက် ရွေးချယ်မှုဇယား
| မရှိ | SEL1 | SEL2 | SEL3 | Interpolation Factor | INDEXSEL | အညွှန်း |
| 1 | နိမ့်သည်။ | နိမ့်သည်။ | နိမ့်သည်။ | 1X | နိမ့်သည်။ | Interpolation 1X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation lx – အညွှန်းကိန်း 180 ဒီဂရီ ရှိသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 1X – အညွှန်းအကြမ်း ( Ungated ) | |||||
| 2 | မြင့်သည်။ | နိမ့်သည်။ | နိမ့်သည်။ | 2X | နိမ့်သည်။ | Interpolation 2X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 2X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 2X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 3 | Opena | နိမ့်သည်။ | နိမ့်သည်။ | 3X | နိမ့်သည်။ | Interpolation 3X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 3X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 3X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 4 | နိမ့်သည်။ | မြင့်သည်။ | နိမ့်သည်။ | 4X | နိမ့်သည်။ | Interpolation 4X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 4X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 4X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 5 | မြင့်သည်။ | မြင့်သည်။ | နိမ့်သည်။ | 5X | နိမ့်သည်။ | Interpolation 5X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 5X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 5X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 6 | Open° | မြင့်သည်။ | နိမ့်သည်။ | 6X | နိမ့်သည်။ | Interpolation 6X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 6X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 6X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 7 | နိမ့်သည်။ | Open° | နိမ့်သည်။ | 8X | နိမ့်သည်။ | Interpolation 8X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 8X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 8X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 8 | မြင့်သည်။ | Open° | နိမ့်သည်။ | 9X | နိမ့်သည်။ | Interpolation 9X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 9X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 9X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 9 | Opena | Open° | နိမ့်သည်။ | 10X | နိမ့်သည်။ | Interpolation 10X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 10X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 10X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 10 | နိမ့်သည်။ | နိမ့်သည်။ | မြင့်သည်။ | 12X | နိမ့်သည်။ | Interpolation 12X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 12X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 12X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 11 | မြင့်သည်။ | နိမ့်သည်။ | မြင့်သည်။ | 16X | နိမ့်သည်။ | Interpolation 16X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 16X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 16X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 12 | Opena | နိမ့်သည်။ | မြင့်သည်။ | 20X | နိမ့်သည်။ | Interpolation 20X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 20X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 20X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 13 | နိမ့်သည်။ | မြင့်သည်။ | မြင့်သည်။ | 25X | နိမ့်သည်။ | Interpolation 25X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 25X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 25X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 14 | မြင့်သည်။ | မြင့်သည်။ | မြင့်သည်။ | 32X | နိမ့်သည်။ | Interpolation 32X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 32X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 32X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| မြင့်သည်။ | မြင့်သည်။ | 50X | နိမ့်သည်။ | Interpolation 50X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ | ||
| မြင့်သည်။ | Interpolation 50X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 50X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 16 | Opena | မြင့်သည်။ | 64X | နိမ့်သည်။ | Interpolation MX – အညွှန်းကိန်း 90 ဒီဂရီ ရှိသည်။ | |
| မြင့်သည်။ | Interpolation MX – အညွှန်းကိန်း 180 ဒီဂရီ ရှိသည်။ | |||||
| ဖွင့်သည်။ | Interpolation MX – အညွှန်းကိန်း 360 ဒီဂရီ ရှိသည်။ | |||||
| 17 | မြင့်သည်။ | Opena | မြင့်သည်။ | 80X | နိမ့်သည်။ | Interpolation 80X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 80X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 80X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 18 | Open° | Open° | မြင့်သည်။ | 100X | နိမ့်သည်။ | Interpolation 100X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 100X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 100X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 19 | Opena | 128X | နိမ့်သည်။ | Interpolation 128X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ | ||
| မြင့်သည်။ | Interpolation 128X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 128X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 20 | မြင့်သည်။ | Opena | 160X | နိမ့်သည်။ | Interpolation 160X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |
| မြင့်သည်။ | Interpolation 160X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 160X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 21 | Opena | နိမ့်သည်။ | Opena | 256X | နိမ့်သည်။ | Interpolation 256X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 256X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 256X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| မြင့်သည်။ | Opena | 320X | နိမ့်သည်။ | Interpolation 320X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ | ||
| မြင့်သည်။ | Interpolation 320X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 320X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 23 | မြင့်သည်။ | မြင့်သည်။ | Opena | 640X | နိမ့်သည်။ | Interpolation 640X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 640X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 640X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 24 | ဖွင့်” | မြင့်သည်။ | Opena | 1000X | နိမ့်သည်။ | Interpolation 1000X – အညွှန်း 90 ဒီဂရီကို ကန့်သတ်ထားသည်။ |
| မြင့်သည်။ | Interpolation 1000X – အညွှန်း 180 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| ဖွင့်သည်။ | Interpolation 1000X – အညွှန်း 360 ဒီဂရီကို ကန့်သတ်ထားသည်။ | |||||
| 25 | နိမ့်သည်။ | Open° | Opena | Ungated Digital | နိမ့်သည်။ | Analog SIN/COS (500 mVpp)။ ဒစ်ဂျစ်တယ် အညွှန်း ( Ungated ) |
| မြင့်သည်။ | Analog SIN/COS (500 mVpp)။ ဒစ်ဂျစ်တယ် အညွှန်း ( Ungated ) | |||||
| ဖွင့်သည်။ | Analog SIN/COS (500 mVpp)။ ဒစ်ဂျစ်တယ် အညွှန်း ( Ungated ) | |||||
| 26 | မြင့်သည်။ | Opena | Opena | လက်တံ | နိမ့်သည်။ | Analog SIN/COS (500 mVpp)၊ Analog Index (1 Vpp) |
| Ungated Digital | မြင့်သည်။ | Analog SIN/COS (1 Vpp)၊ ဒစ်ဂျစ်တယ် အညွှန်း ( Ungated ) | ||||
| လက်တံ | ဖွင့်သည်။ | Analog SIN/COS (1 Vpp)၊ Analog Index (1Vpp) | ||||
| 27 | Opena | Opena | Opena | SPI မုဒ် | နိမ့်သည်။ | SPI မုဒ်- ပရိုဂရမ် ရွေးချယ်မှု |
| မြင့်သည်။ | SPI မုဒ်- အထွက်ကို ဖွင့်ထားသည်။ | |||||
| ဖွင့်သည်။ | SSI 3W Modeb |
a အဖွင့်ရွေးချယ်မှုအား vol ၏အလယ်တွင် ချိတ်ဆက်ရပါမည်။tage divider ဆားကစ်။ ပုံ 5 ကိုကြည့်ပါ။
ခ SSI 3W မုဒ်သည် စောင့်ကြည့်ရေး ရည်ရွယ်ချက်အတွက်သာ ဖြစ်သည်။
ပုံ 5: Voltage Divider Circuit ၊

2 x 4.7-kΩ resistors (VCC to GND) ကိုသုံးပါ။
ဒစ်ဂျစ်တယ် ပေါင်းစည်းခြင်းအချက်သည် အမျိုးမျိုးသော လည်ပတ်အမြန်နှုန်း (RPM) နှင့် တော်လှန်ရေးအလိုက် ရေတွက်ခြင်း (CPR) တန်ဖိုးများအတွက် အောက်ပါညီမျှခြင်းအပေါ် အခြေခံသည်။
RPM = (အကြိမ်ရေ x 60) / CPR
CPR (@ 1X interpolation) သည် လည်ပတ်မှု အချင်းဝက် (ROP) အပေါ် မူတည်သော အောက်ပါညီမျှခြင်းအပေါ် အခြေခံသည်။
CPR = LPI x 2π x ROP (လက်မ) သို့မဟုတ် CPR = LP mm x 2π x ROP (mm)
မှတ်ချက်: LP မီလီမီတာ (လိုင်းများတစ်မီလီမီတာ) = LPI / 25.4
2.1 Programmable Options ကိုရွေးချယ်ပါ။
1X မှ 1024X မှ interpolation factor ဖြင့် SPI programmable
- ပြင်ပရွေးချယ်မှုကို SPI မုဒ်သို့ စီစဉ်သတ်မှတ်ပါ- ပရိုဂရမ်ရွေးချယ်မှု။
- ဖွဲ့စည်းမှုပြီးနောက် အချက်ပြများ ထုတ်ပေးရန်အတွက်၊ ပြင်ပရွေးချယ်မှုကို SPI မုဒ်သို့ သတ်မှတ်ပါ- Output ကို ဖွင့်ထားသည်။
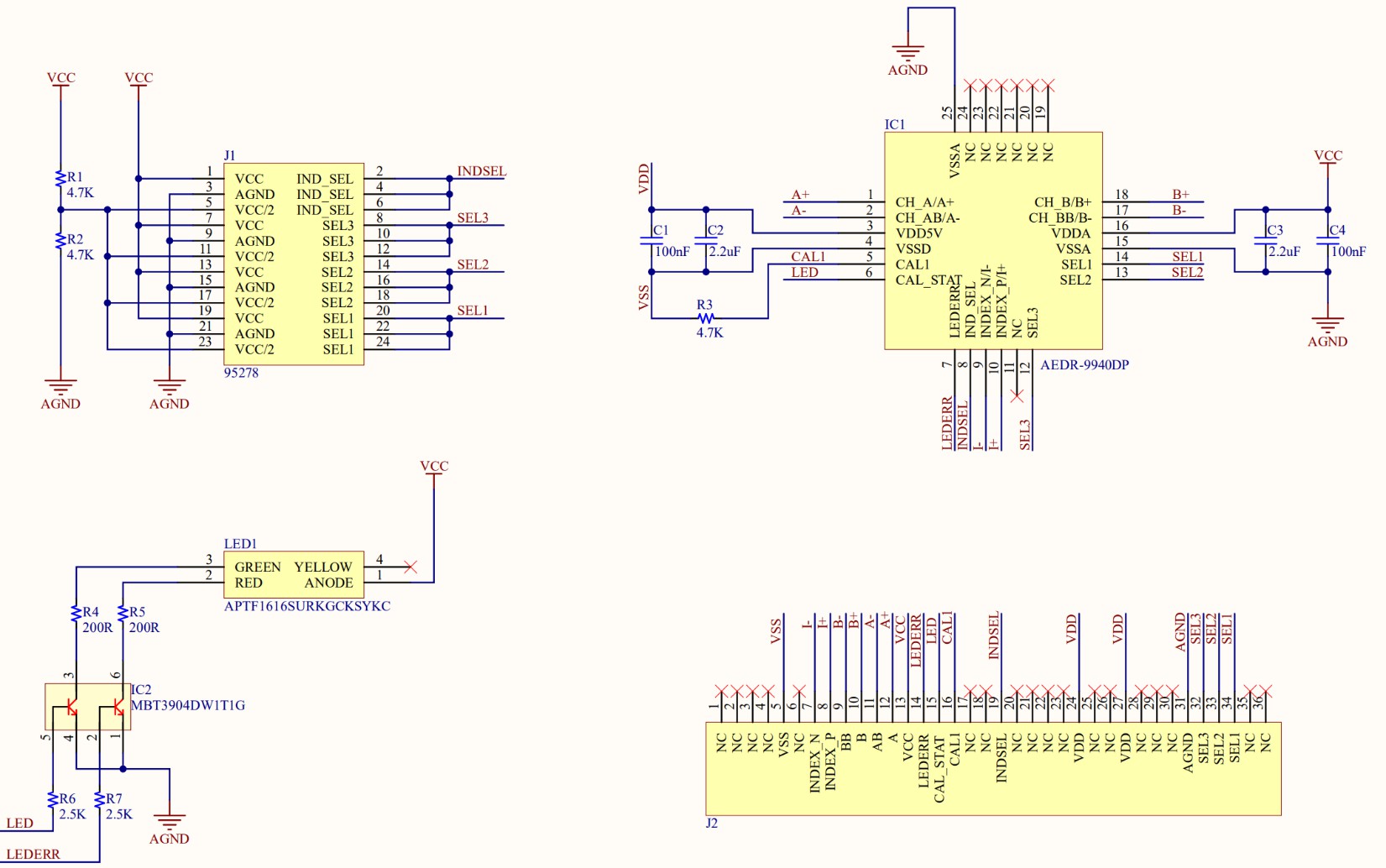
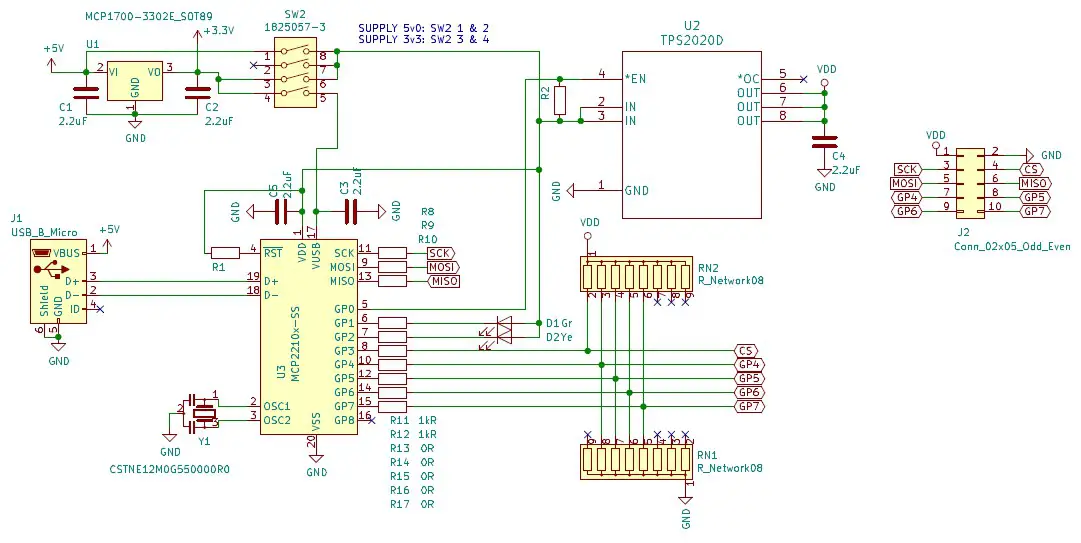
Board Schematic နှင့် Pin Assignment
ပုံ 6- HEDS-9930EVB အကဲဖြတ်ဘုတ်အဖွဲ့ ဇယားကွက်
3.1 ချိတ်ဆက်ကိရိယာ တာဝန်
ဇယား 2- ချိတ်ဆက်ကိရိယာ 1 Pin Assignment
| ချိတ်ဆက်ကိရိယာ 1 (အပေါ်ဘက်ခြမ်း) | တံဆိပ် | ချိတ်ဆက်ကိရိယာ 1 (အောက်ခြေအခြမ်း) | တံဆိပ် |
| 1 | NC | 1 | NC |
| 2 | NC | 2 | NC |
| 3 | SEL1 | 3 | ကယ်လီ |
| 4 | SEL2 | 4 | CAL STAT |
| 5 | SEL3 | 5 | LEDERR |
| 6 | လက်ကျန် | 6 | VCC |
| 7 | NC | 7 | A+ |
| 8 | NC | 8 | A- |
| 9 | NC | 9 | B+ |
| 10 | VDD | 10 | B- |
ဇယား 2- ချိတ်ဆက်ကိရိယာ 1 Pin Assignment
| ချိတ်ဆက်ကိရိယာ 1 (အပေါ်ဘက်ခြမ်း) | တံဆိပ် | ချိတ်ဆက်ကိရိယာ 1 (အောက်ခြေအခြမ်း) | တံဆိပ် |
| 11 | NC | 11 | I+ |
| 12 | NC | 12 | I- |
| 13 | VDD | 13 | NC |
| 14 | NC | 14 | VSS |
| 15 | NC | 15 | NC |
| 16 | NC | 16 | NC |
| 17 | NC | 17 | NC |
| 18 | INDSEL | 18 | NC |
Connector 1 ၏ လက်ချောင်းဒီဇိုင်းသည် အောက်ဖော်ပြပါ ကတ်အစွန်း ချိတ်ဆက်ကိရိယာများထဲမှ တစ်ခုနှင့်တစ်ခု ကိုက်ညီသည်-
- EDAC၊ CONN EDGE DUAL FMALE 36POS 0.100၊ P/N# 395-036-520-202
- SULINS၊ CONN EDGE DUAL FMALE 36POS 0.100၊ P/N# EBC18DREH
အထက်ဖော်ပြပါ ကတ်အစွန်း ချိတ်ဆက်ကိရိယာကို အသုံးပြုရန် လိုအပ်ပါက သက်ဆိုင်ရာ ကတ်အစွန်းလက်ချောင်းများကို လက်ဖြင့် ဂဟေဖြင့် ပြုလုပ်၍ လိုအပ်သော ချိတ်ဆက်မှုများကို ပြုလုပ်နိုင်ပါသည်။
ဇယား 3- ချိတ်ဆက်ကိရိယာ 2 Pin Assignment
| ချိတ်ဆက်ကိရိယာ 1 (အပေါ်ဘက်ခြမ်း) | တံဆိပ် | ပြည်နယ် |
| 1 | SEL1 | VCC |
| 2 | လက်ကျန် | |
| 3 | ဖွင့်ပါ။ | |
| 4 | SEL2 | VCC |
| 5 | လက်ကျန် | |
| 6 | ဖွင့်ပါ။ | |
| 7 | SEL3 | VCC |
| 8 | လက်ကျန် | |
| 9 | ဖွင့်ပါ။ | |
| 10 | INDEX SEL | VCC |
| 11 | လက်ကျန် | |
| 12 | ဖွင့်ပါ။ |
မှတ်ချက်: SEL1၊ SEL9940 နှင့် SEL198.4375 jumper ရာထူးများကိုပြောင်းလဲခြင်းဖြင့် ရရှိနိုင်သောအမျိုးမျိုးသော interpolation ရွေးချယ်မှုရွေးချယ်မှုများအတွက် ဇယား 1၊ AEDR-2 3 LPI အတွက် ရွေးချယ်မှုဇယားကို ကိုးကားပါ။
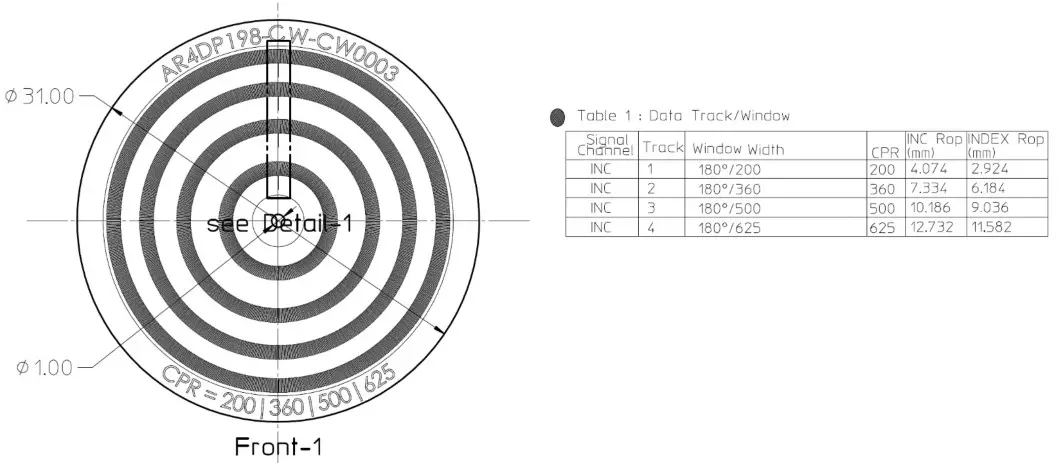
Code Wheel Drawing
AEDR-9940 အကဲဖြတ်ဘုတ်အတွက်ample၊ ကိုက်ညီသောကုဒ်ဘီး sample ပုံများကို အောက်ပါပုံများတွင် ပြထားသည်။
s ကိုအသေးစိတ်ပုံဆွဲဘို့ample ကုဒ်ဘီး၊ သင့်ဒေသဆိုင်ရာ FAE ထံမှ တောင်းဆိုချက်။
ပုံ 7- Code Wheel Multiple Optical Radius 200၊ 360၊ 500၊ 625 CPR Base
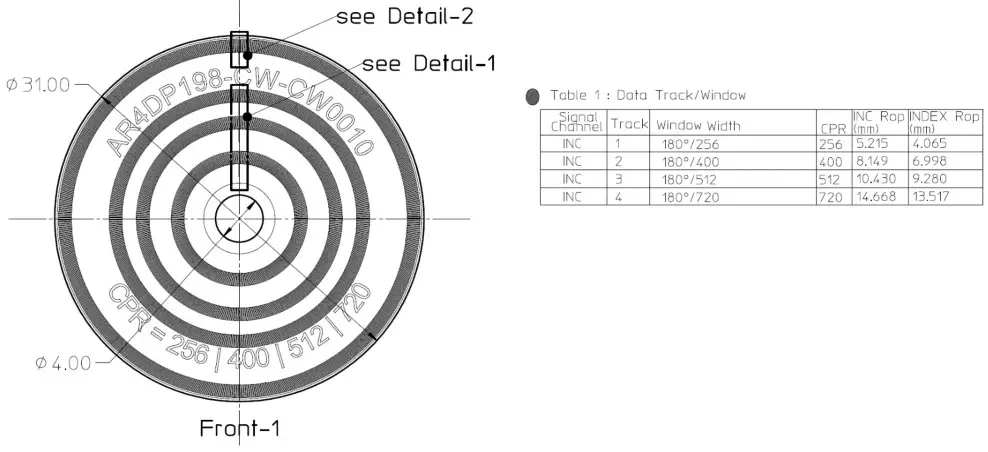
 ပုံ 8- Code Wheel Multiple Optical Radius 256၊ 400၊ 512၊ 720 CPR Base
ပုံ 8- Code Wheel Multiple Optical Radius 256၊ 400၊ 512၊ 720 CPR Base
HEDS-9940PRGEVB ပရိုဂရမ်သွင်းခြင်း USB-SPI Kit
ဇယား 1 တွင် ပေးထားသည့် တန်ဖိုးများထက် အခြားသော ပရိုဂရမ် ပေါင်းကူးခြင်း တန်ဖိုးကို SEL9940, SEL198.4375, နှင့် SEL1 ရွေးချယ်မှု ပင်နံပါတ်များကို အသုံးပြု၍ AEDR-2 3 LPI အတွက် ရွေးချယ်မှု ဇယားကို SPI မျက်နှာပြင် မှတစ်ဆင့် သင် AEDS-9940 ကုဒ်နံပါတ် ASIC သို့ ချိတ်ဆက်နိုင်ပါသည်။
Broadcom® သည် သင်အလိုရှိသော interpolation တန်ဖိုးကို အစီအစဉ်ဆွဲရန်အတွက် PC-based စိတ်ကြိုက်ပရိုဂရမ်တစ်ခုနှင့်အတူ ရိုးရှင်းသော USB to SPI ပရိုဂရမ်းမင်းကိရိယာအစုံကို ပေးပါသည်။
ပုံ 9- HEDS-9940PRGEVB USB to SPI ပရိုဂရမ်မာကိရိယာအစုံ
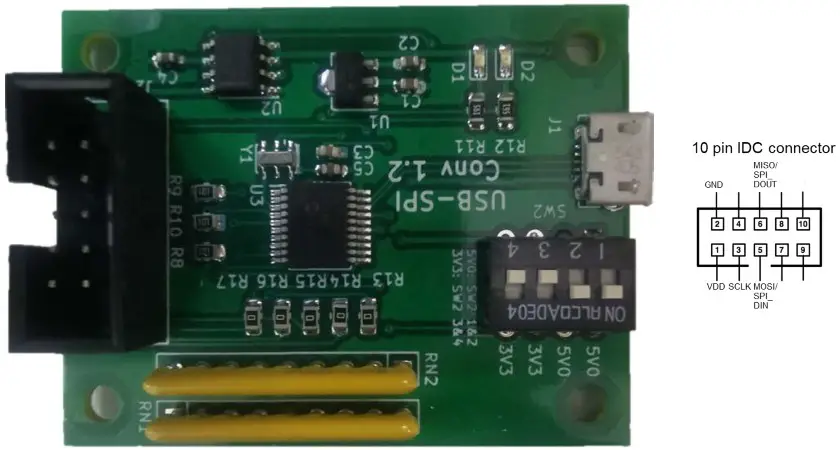
ပုံ 10- HEDS-9940PRGEVB USB to SPI ပရိုဂရမ်မာ အစုံအလင်
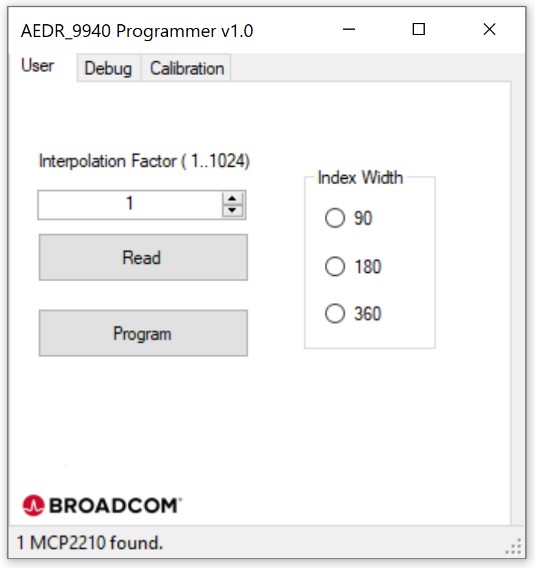
AEDR-9940 Gateway Programming GUI
HEDS-9940PRGEVB အစုံကို AEDR_9940_Gateway.exe နှင့် ကုဒ်ကုဒ်ဒါ ASIC တွင် လိုချင်သော interpolation factor ကို ပရိုဂရမ်ပြုလုပ်ရန် အသုံးပြုမည်ဖြစ်သည်။
- zip ကိုဒေါင်းလုဒ်လုပ်ပါ။ file မှ- https://broadcom.box.com/v/HEDS-9940-Programming-Software
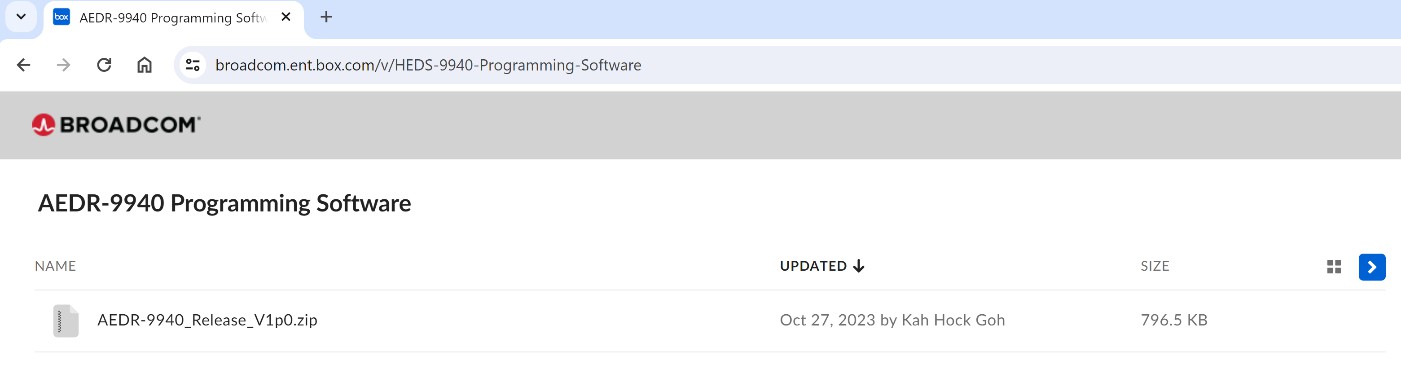
- ဇစ်ကိုသိမ်းဆည်းပါ။ file သင်၏ PC ရှိ local drive ထဲသို့။
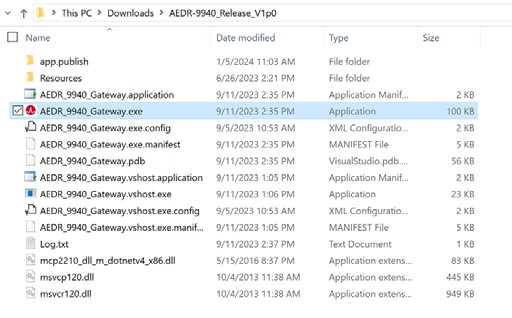
- သင်နှစ်သက်ရာ ဖိုင်တွဲတစ်ခုသို့ AEDR-9940_Release_Vxpx.zip ကို ဇစ်ဖွင့်ပါ။

- AEDR_9940_Gateway.exe ကို နှစ်ချက်နှိပ်ပါ။
- AEDR_9940_Gateway.exe ဆော့ဖ်ဝဲကို အလုပ်လုပ်သည်နှင့် တပြိုင်နက်၊ ဘုတ်ကို ရှာဖွေတွေ့ရှိသင့်သည်။
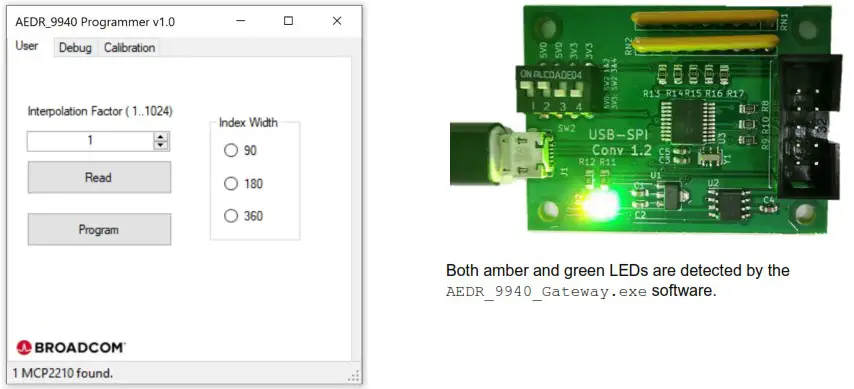
- အောက်ပါ မက်ဆေ့ချ် ပေါ်လာပါက၊ ဘုတ်ချိတ်ဆက်မှုများကို စစ်ဆေးပြီး ထပ်စမ်းကြည့်ပါ။
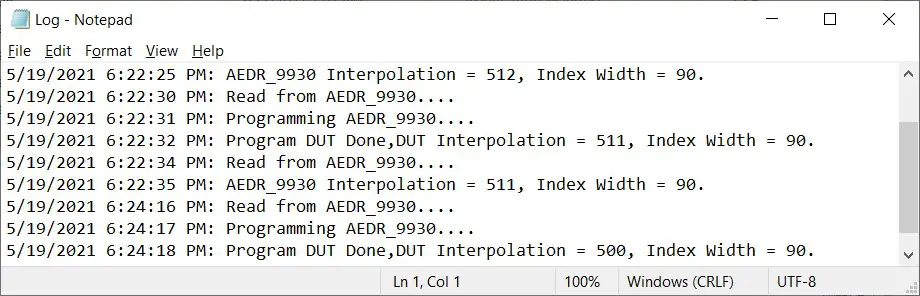
- AEDR-9940 ကုဒ်နံပါတ် ASIC မှသိမ်းဆည်းထားသောဆက်တင်များကိုပြန်ဖတ်ရန် Read ကိုနှိပ်ပါ။
a ရှိပြီးသားဆက်တင်များကို အောင်မြင်စွာဖတ်ပြီးပါက၊ ၎င်းသည် သိမ်းဆည်းထားသော Interpolation Factor နှင့် Index Width ဆက်တင်များကို ပြသသည်။
 ခ AEDR-9940 ကို ချိတ်ဆက်ထားခြင်း သို့မဟုတ် မတွေ့ပါက၊ ပရိုဂရမ်သည် ရပ်တန့်သွားမည်ဖြစ်သည်။ ပျက်ကွက်မှုအခြေအနေကို စစ်ဆေးရန် တူညီသောလမ်းညွှန်တွင် log.txt ကို ကိုးကားပါ။
ခ AEDR-9940 ကို ချိတ်ဆက်ထားခြင်း သို့မဟုတ် မတွေ့ပါက၊ ပရိုဂရမ်သည် ရပ်တန့်သွားမည်ဖြစ်သည်။ ပျက်ကွက်မှုအခြေအနေကို စစ်ဆေးရန် တူညီသောလမ်းညွှန်တွင် log.txt ကို ကိုးကားပါ။
ဂ။ AEDR-9940 နှင့် ဆက်သွယ်မှု ချို့ယွင်းပါက၊ ပရိုဂရမ်သည် ထွက်ပါသည်။ အမှားအယွင်း မက်ဆေ့ချ်ကို စစ်ဆေးရန် log.txt ကို ကိုးကားပါ။ - လိုအပ်သော interpolation factor (1 မှ 1024) နှင့် အညွှန်း width setting ကိုထည့်ပါ။ ဆက်တင်များကိုသိမ်းဆည်းရန် Program ကိုနှိပ်ပါ။
- သတင်းစကား Program DUT OK! ဆက်တင်များကို အောင်မြင်စွာ သိမ်းဆည်းသောအခါတွင် ပြသသည်။
Calibration လုပ်ဆောင်ရန် AED-9940 Gateway SPI Protocol ကို အသုံးပြုခြင်း။
ချိန်ညှိနေစဉ်အတွင်း လှိုင်းဂယက် သို့မဟုတ် ချောမွေ့သောမျဉ်းဖြောင့်ရွေ့လျားမှုဖြင့် မော်တာလည်ပတ်မှု လိုအပ်သည်။ ၎င်းသည် ကောင်းမွန်သော crossover တစ်ခုရရှိရန် အညွှန်းအချက်ပြမှုများကို အလိုအလျောက်ချိန်ညှိနိုင်စေရန်ဖြစ်သည်။
- မော်တာကို အဆက်မပြတ် အမြန်နှုန်း 500 rpm သို့မဟုတ် linear s ဖြင့် လှည့်ပါ။tage အပြန်အလှန်လှုပ်ရှားမှု (လေဖြတ်ခြင်း[50 mm/s])
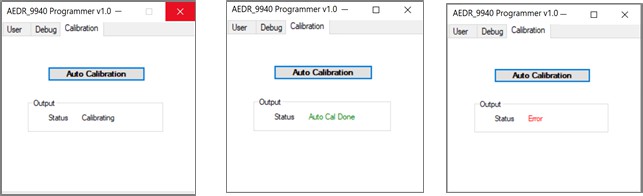
- Auto Calibration ကိုနှိပ်ပါ။
- ချိန်ညှိခြင်း လုပ်ဆောင်နေပါသည်။ အဆင့်အတန်းရှိ ပြကွက်များကို ချိန်ညှိခြင်း။
- စံသတ်မှတ်ချက်သည် ချိန်ညှိခြင်းအောင်မြင်စွာပြီးဆုံးပါက Auto Cal Done ကိုပြသသည်။ မဟုတ်ရင် Error ပြပါတယ်။
မှတ်ချက်: ကျယ်ပြန့်သော spatial displacement သို့မဟုတ် index signals crossover ရယူရန် ပျက်ကွက်ခြင်းကြောင့် ချိန်ညှိမှုအမှားအယွင်းဖြစ်နိုင်သည်။
![]() HEDS-9940PRGEVB အသုံးပြုသူလမ်းညွှန်
HEDS-9940PRGEVB အသုံးပြုသူလမ်းညွှန်
အကဲဖြတ်ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းကိရိယာအစုံ
စာရွက်စာတမ်းများ / အရင်းအမြစ်များ
 |
BROADCOM HEDS-9940PRGEVB အကဲဖြတ်ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းကိရိယာအစုံ [pdf] အသုံးပြုသူလမ်းညွှန် HEDS-9940PRGEVB၊ HEDS-9940PRGEVB အကဲဖြတ်ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းကိရိယာအစုံ၊ အကဲဖြတ်ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းကိရိယာအစုံ၊ ဘုတ်အဖွဲ့နှင့် ပရိုဂရမ်းမင်းအစုံ၊ ပရိုဂရမ်းမင်းကိရိယာအစုံ၊ |



